Ходячий робот
admin | 10.12.2025
3D Попередній перегляд
Завантаження 3D моделі...
Галерея (65)
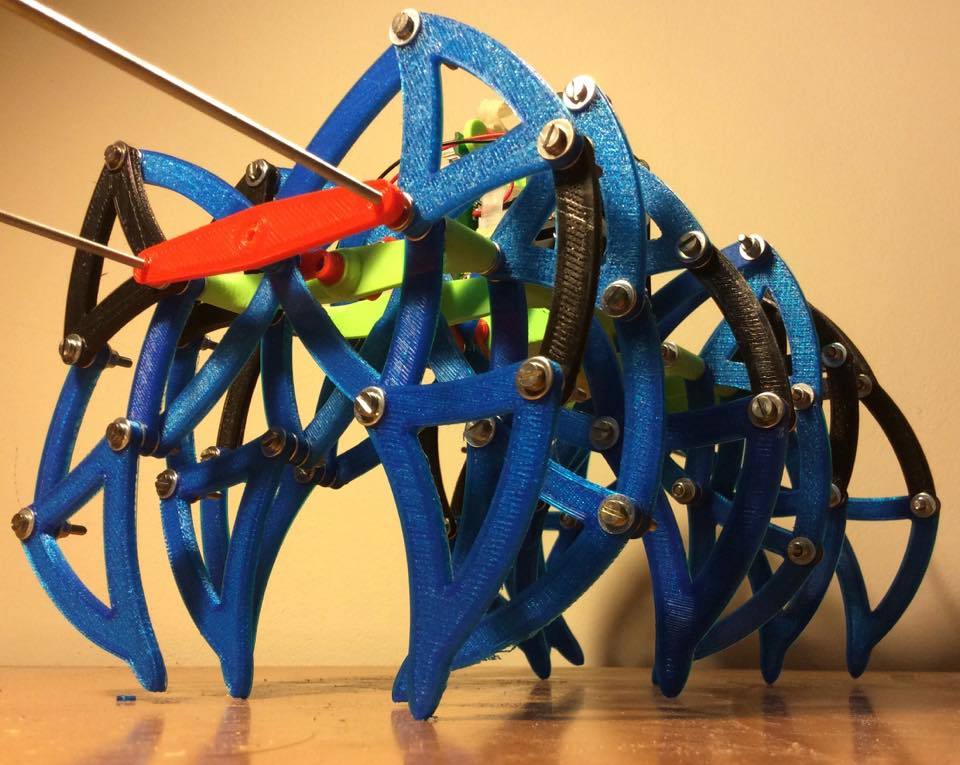
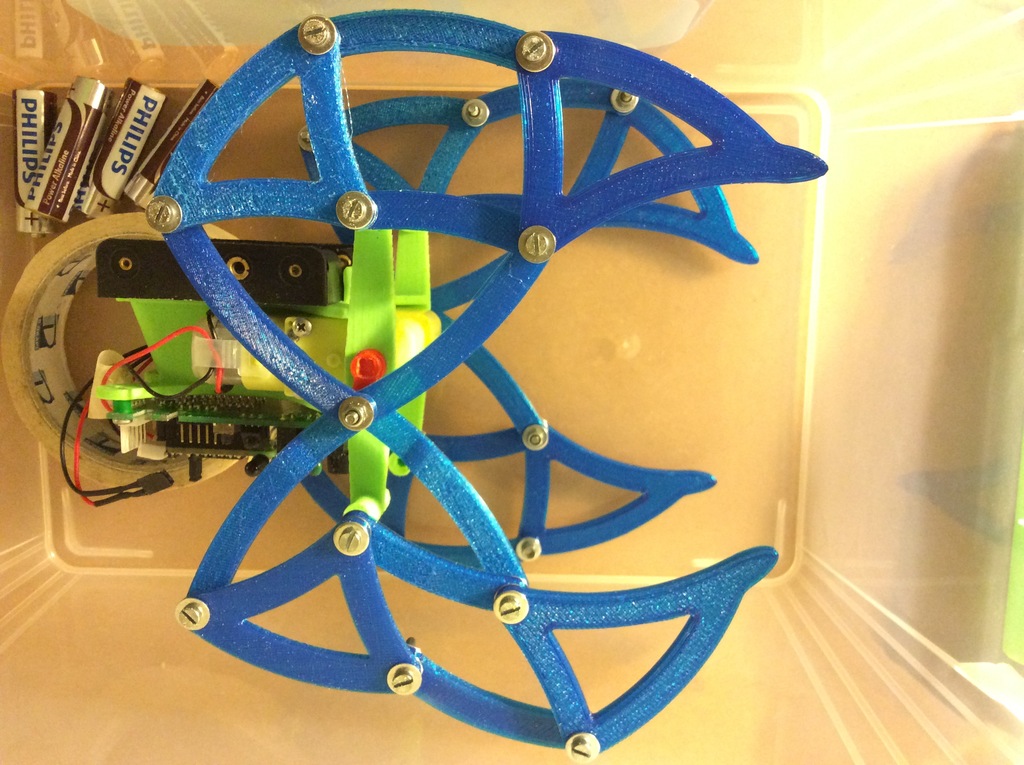


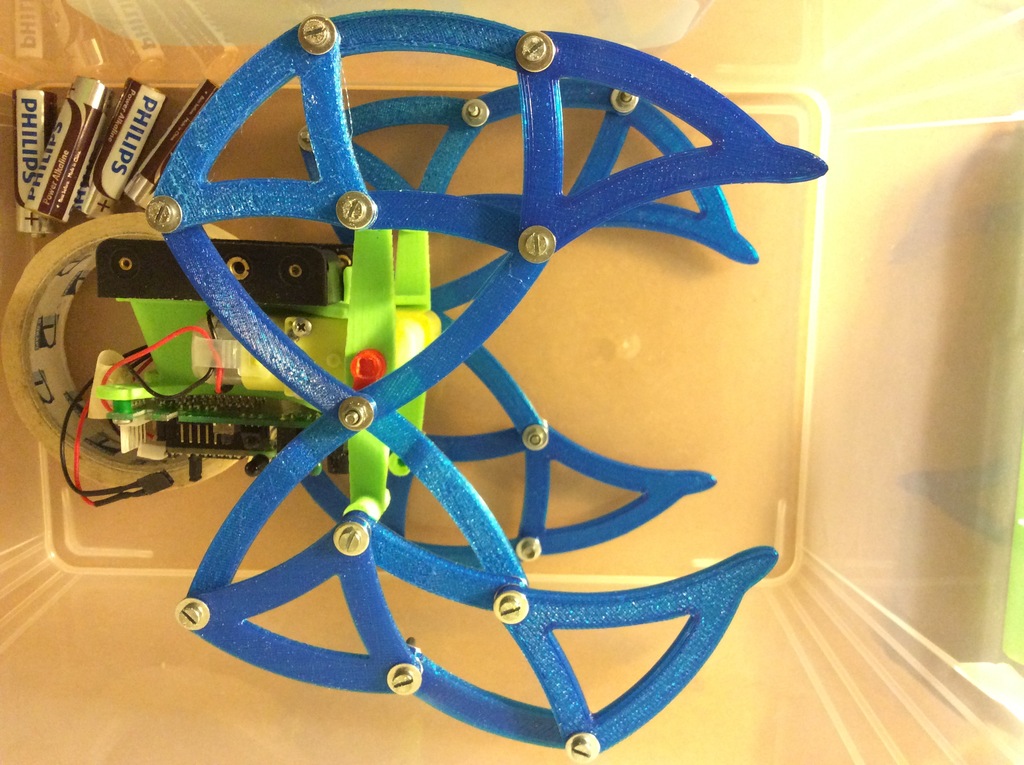
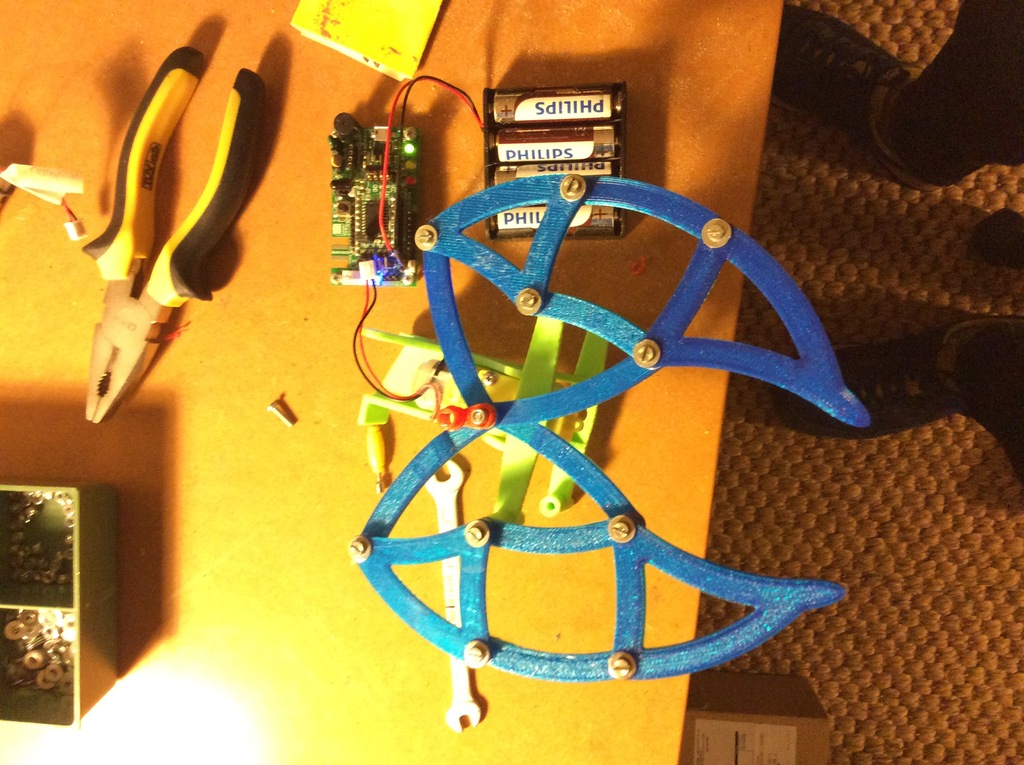

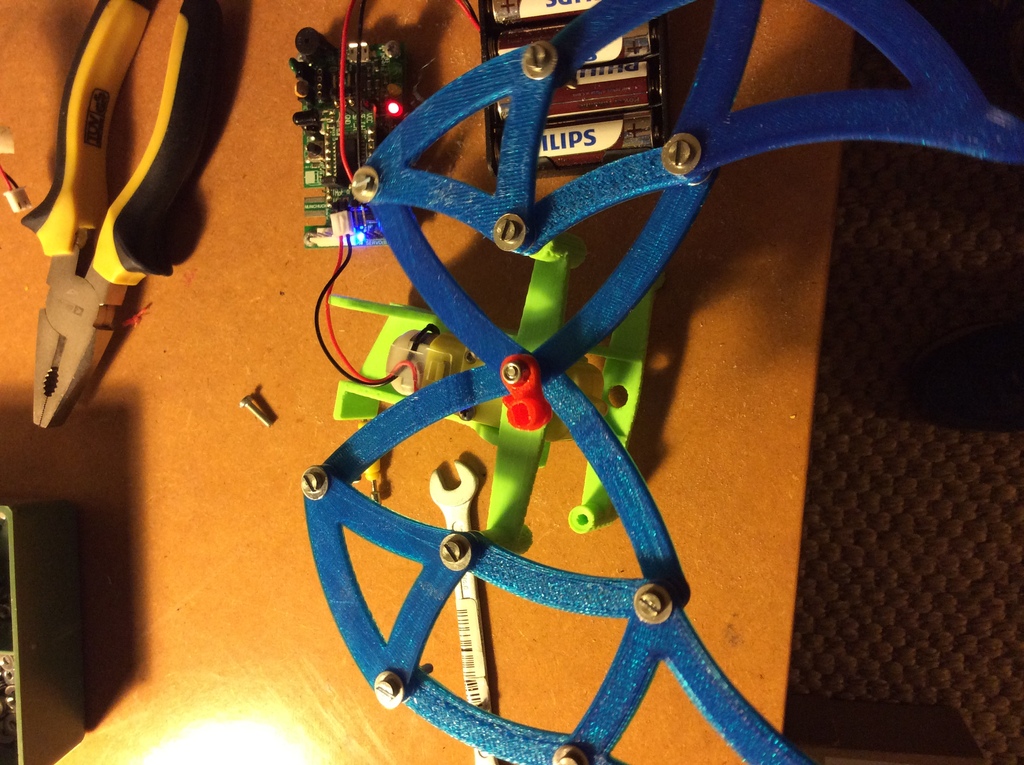



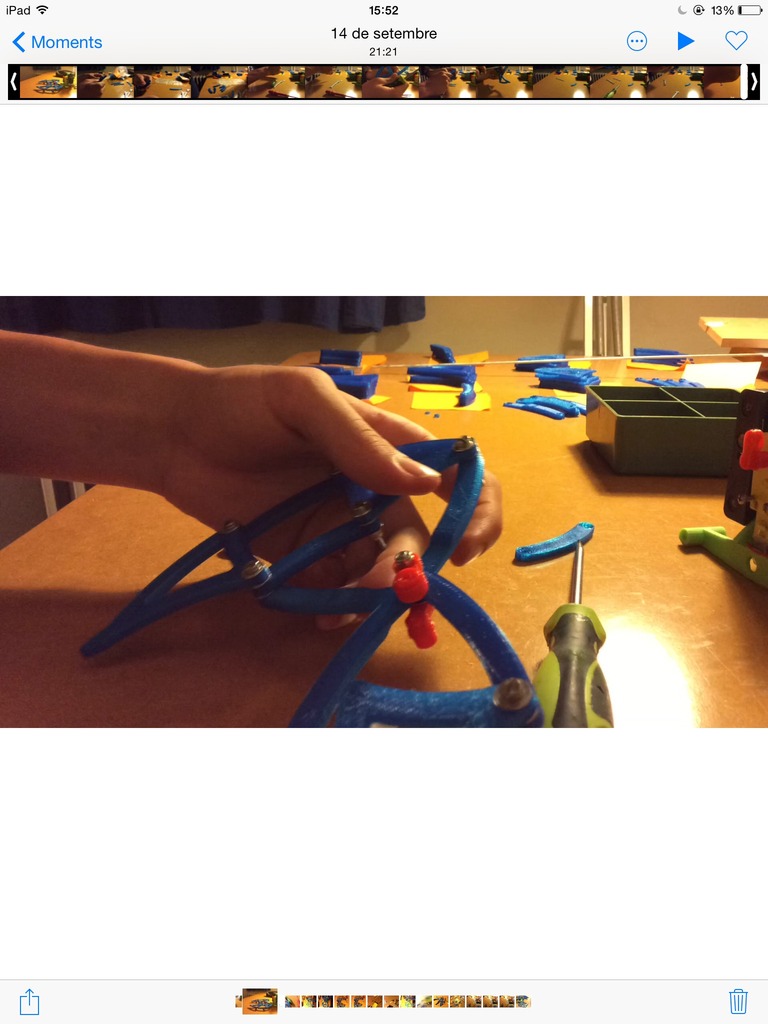



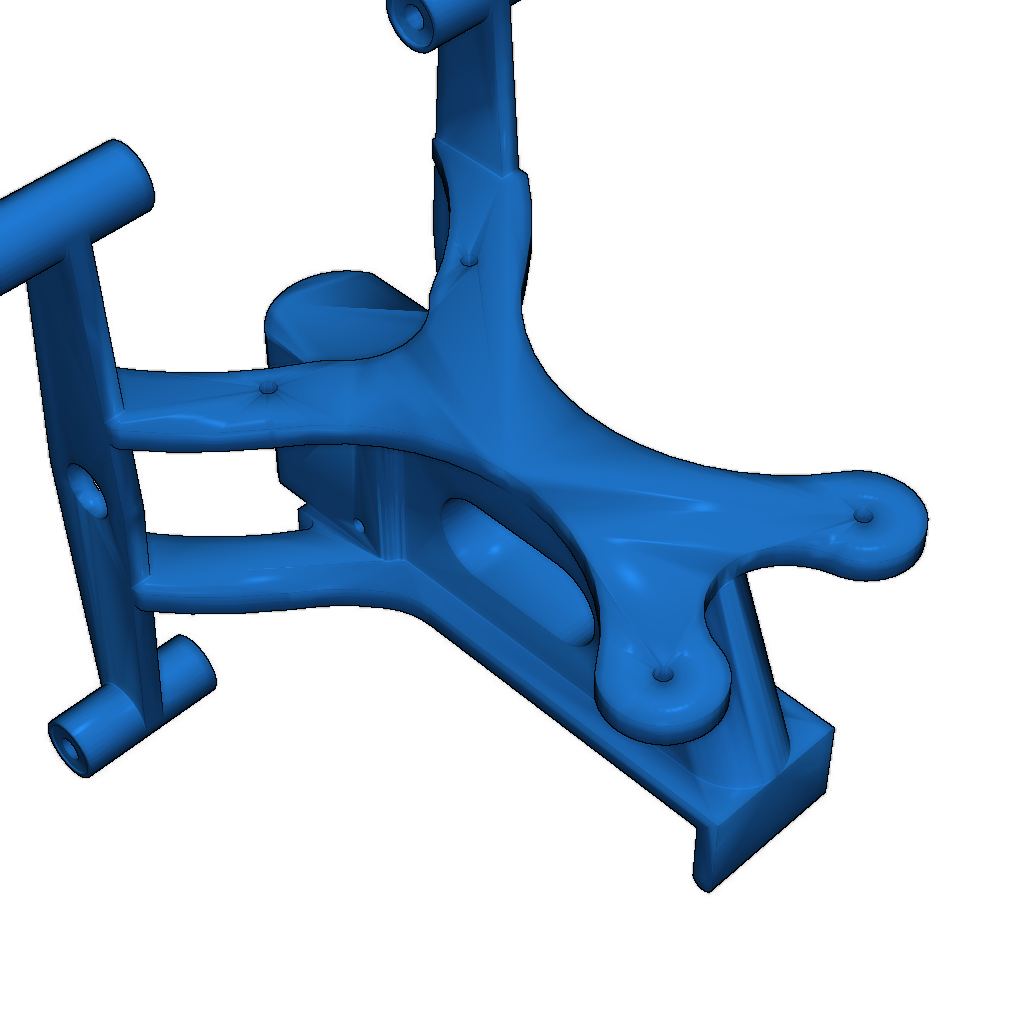
Опис моделі: Ходячий робот, що використовує механізм Тео Янсана, є цікавим проєктом для любителів робототехніки.
Використання: Модель призначена для створення рухомого робота, який може бути використаний в освітніх цілях або як основа для подальших експериментів.
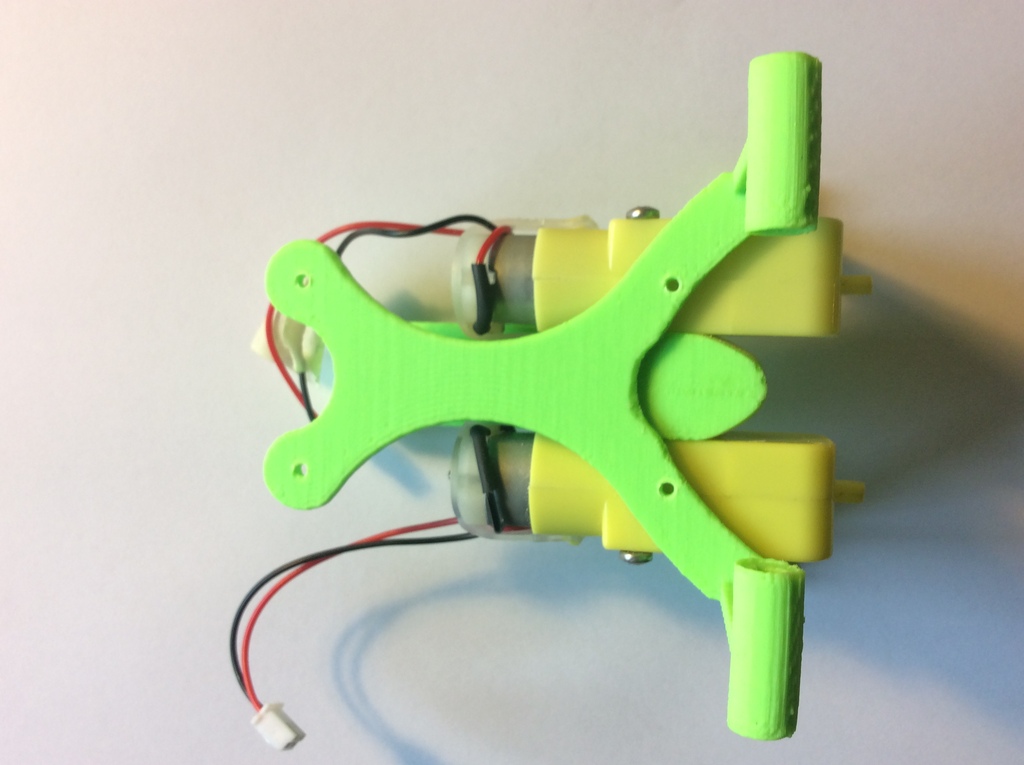
Особливості конструкції: Робот управляється платою Picaxe, але також можливе використання інших контролерів. У конструкції передбачена можливість використання шестигранного ключа для покращення роботи мотора ENCAIX.
Рекомендації щодо друку: Зверніть увагу на налаштування друку для забезпечення якісного результату. Рекомендується дотримуватись інструкцій, представлених у PDF файлі, для успішної зборки та налаштування робота.
-
components.pdfСкачати
-
ENCAIX_MOTOR_HEXAGON_sense_voladis.STLСкачати
-
ENCAIX_MOTOR_SENSE_VOLADIS.STLСкачати
-
ENCAIX_MOTOR_HEXAGON.STLСкачати
-
ENCAIX_MOTOR_cargol.STLСкачати
-
_TRANSMISSIO_MOTOR_HEXAGON.STLСкачати
-
EXCENTRICA_HEXAGON_CLAU.STLСкачати
-
TRANSMISSIO_MOTOR_UNA_POTA_FINAL_reformat_cargol_repaired.stlСкачати
-
SEPARADOR_MIG_cargolbosense.STLСкачати
-
SEPARADOR_MIG_3_potes.STLСкачати
-
TRANSMISSIO_MOTOR_UNA_POTA_cargol.STLСкачати
-
AB_dreta_reformat_cargol.STLСкачати
-
AE_dreta_reformat_cargol.STLСкачати
-
TRANSMISSIO_FINAL.STLСкачати
-
BCDbo_cargol_dreta.STLСкачати
-
AB_esquerra_reformat_cargol.STLСкачати
-
AE_esquerra_reformat_cargol.STLСкачати
-
CE_cargol_esquerra.STLСкачати
-
SEPARADOR_MIG_3_POTES_NOU.STLСкачати
-
CE_cargol_dreta.STLСкачати
-
DF_cargol_dreta.STLСкачати
-
BCDbo_cargol_esquerra.STLСкачати
-
EFG_cargol_esquerra.STLСкачати
-
DF_cargol_esquerra.STLСкачати
-
EFG_cargol_dreta.STLСкачати
-
TAULA_SUPORT.STLСкачати
-
SEPARADOR_FINAL_cargol.STLСкачати
Для додавання коментарів необхідно увійти.
Інформація
- Автор: admin
- Дата: 10.12.2025
- Категорія: Хобі та Радіокеровані моделі
- Переглядів: 74
- Завантажень: 354
- Вподобайок: 0
- Зображень: 65
- Файлів: 27
Скачати ZIP