Ноги робота Damian (InMoov)
admin | 10.12.2025
3D Предпросмотр
Загрузка 3D модели...
ЛКМ: Вращение | Колесо: Зум | ПКМ: Перемещение
Галерея (141)


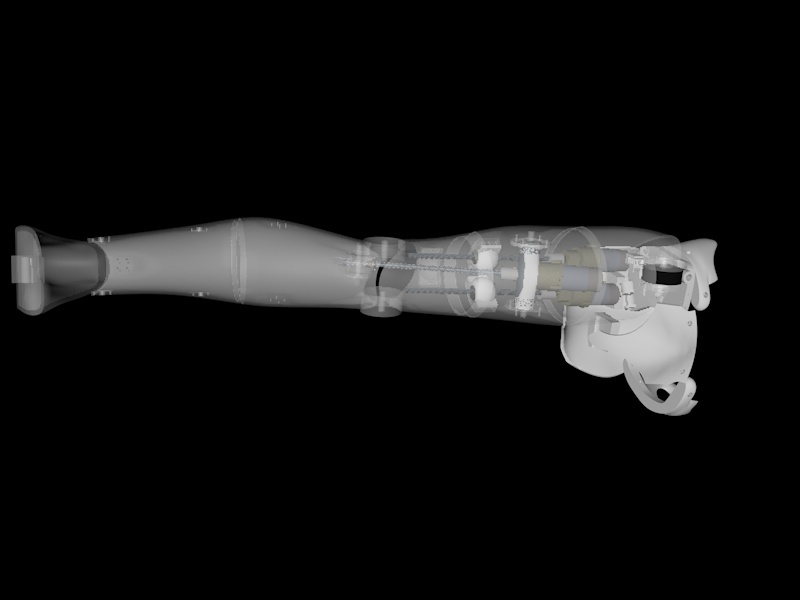









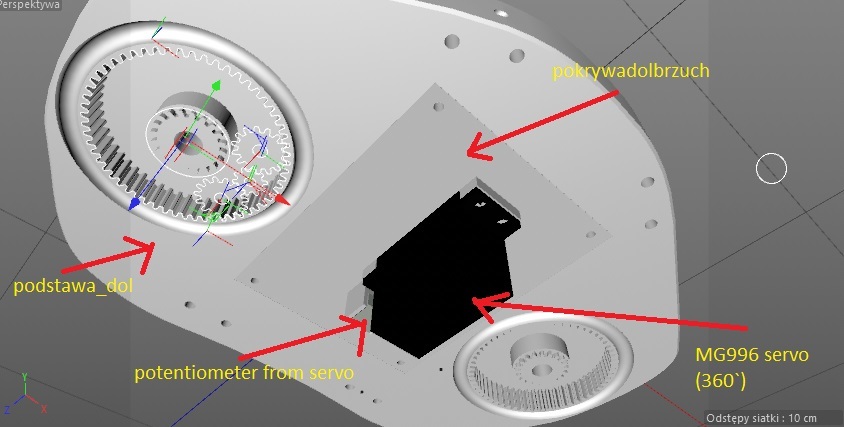
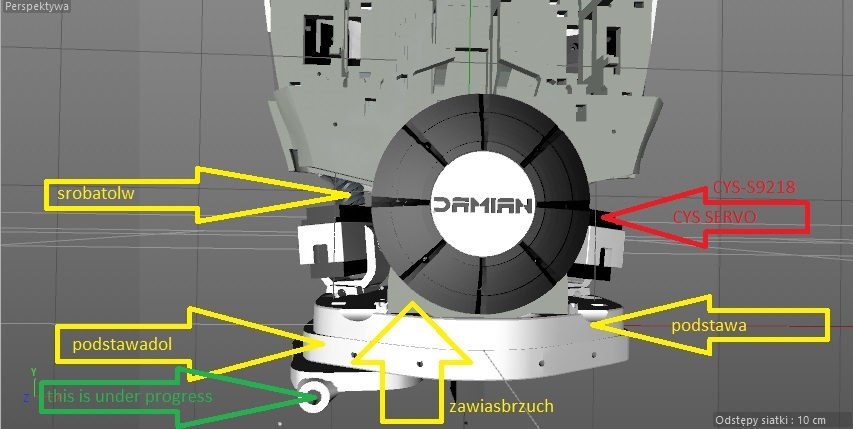
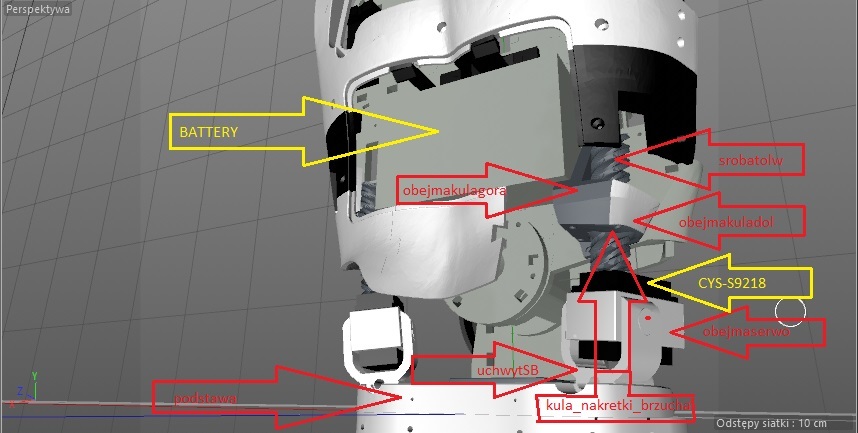


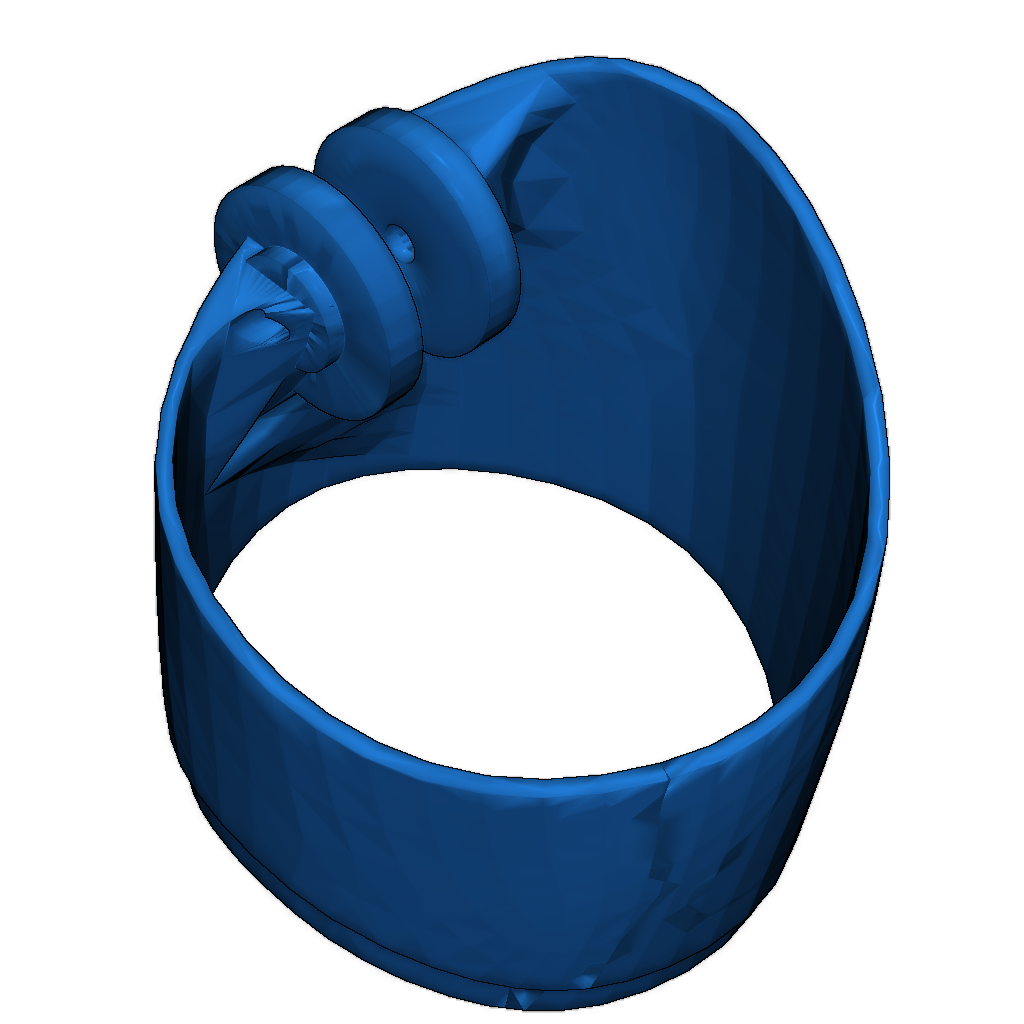

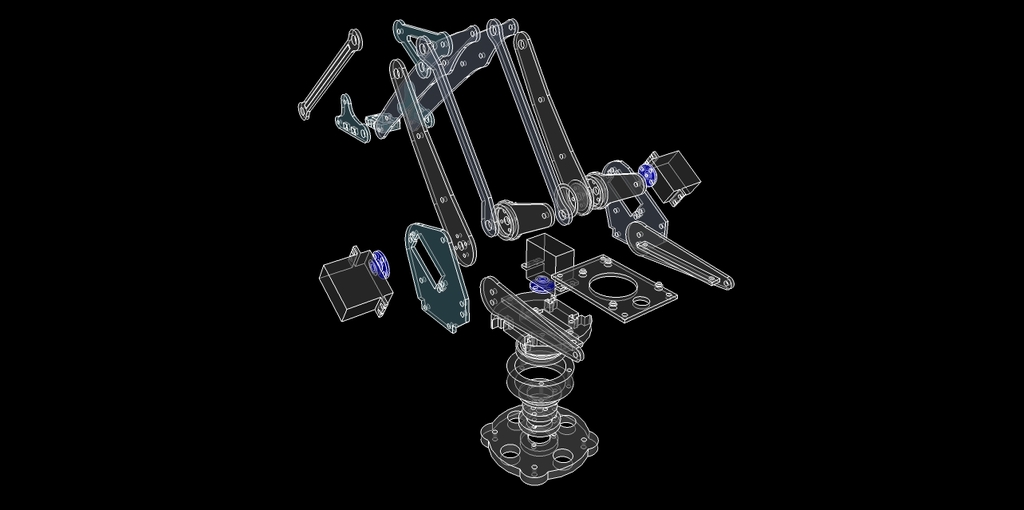
Модель ног для робота Damian (InMoov) предназначена для сборки и тестирования робототехнических проектов. Эти ноги могут использоваться в различных роботах, требующих подвижности и функциональности.
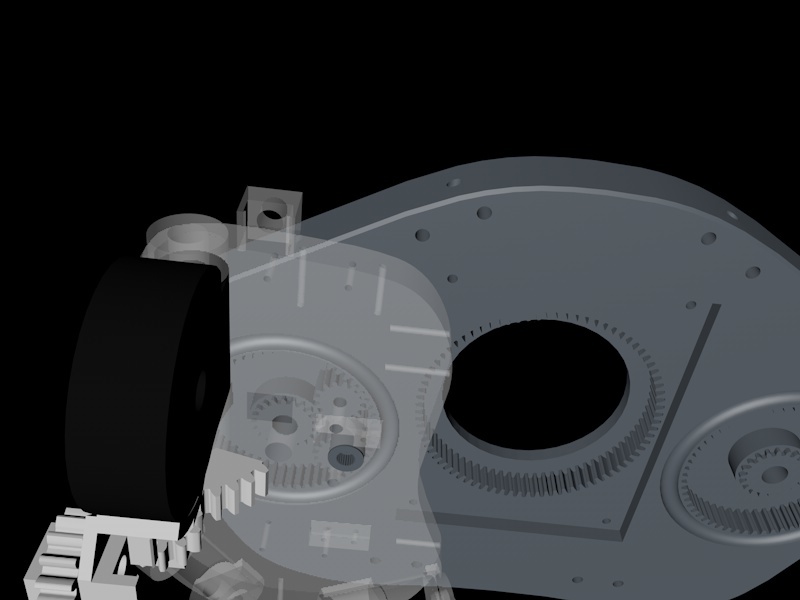
Особенности конструкции:
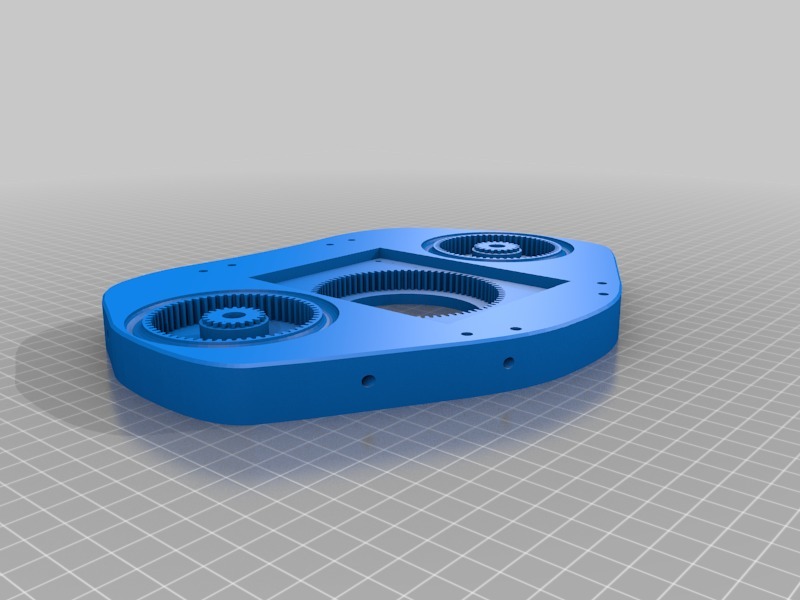
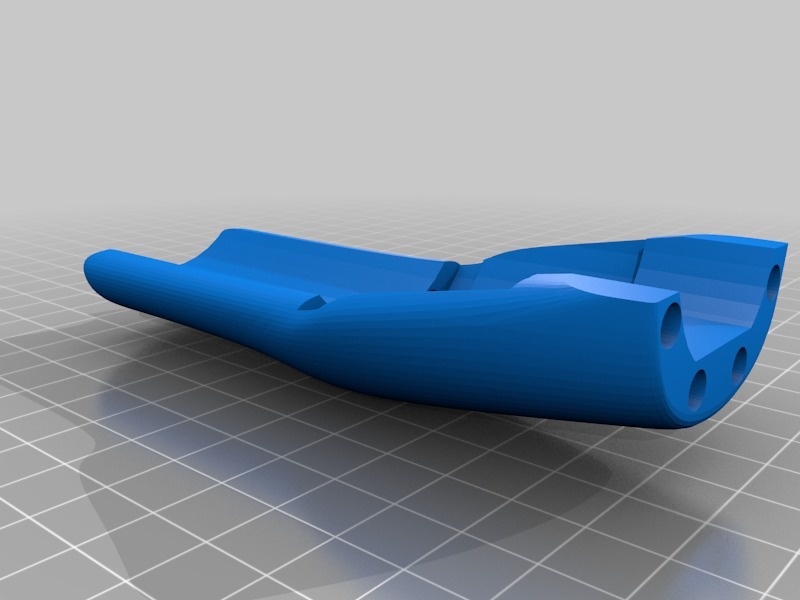
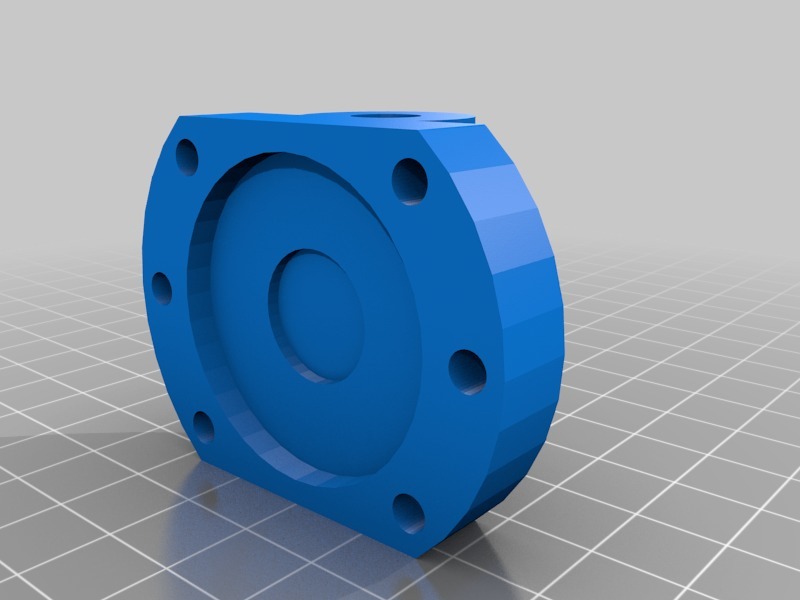
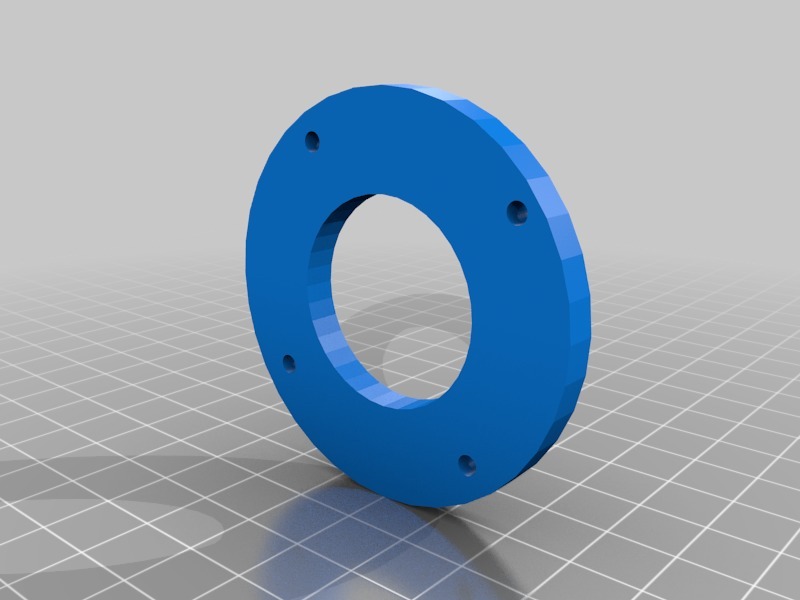
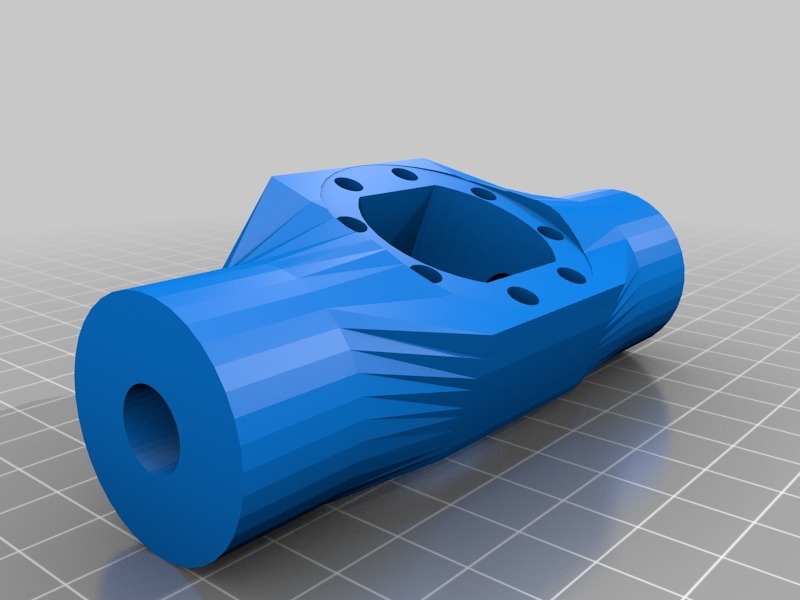
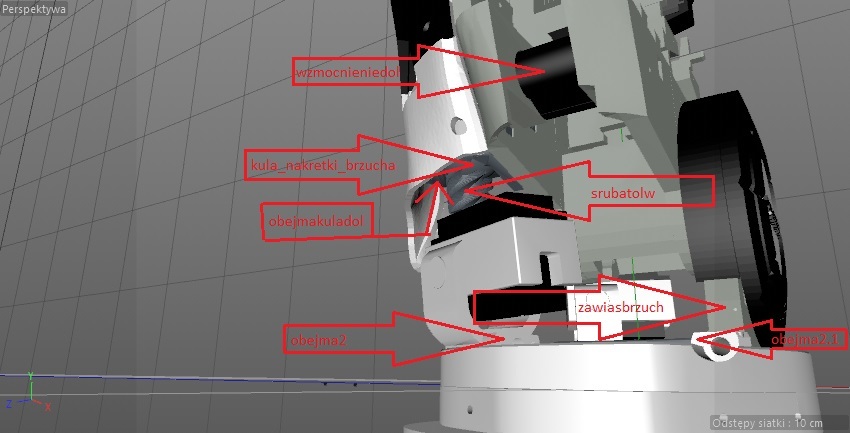
- Ноги состоят из нескольких частей, которые необходимо напечатать и собрать.
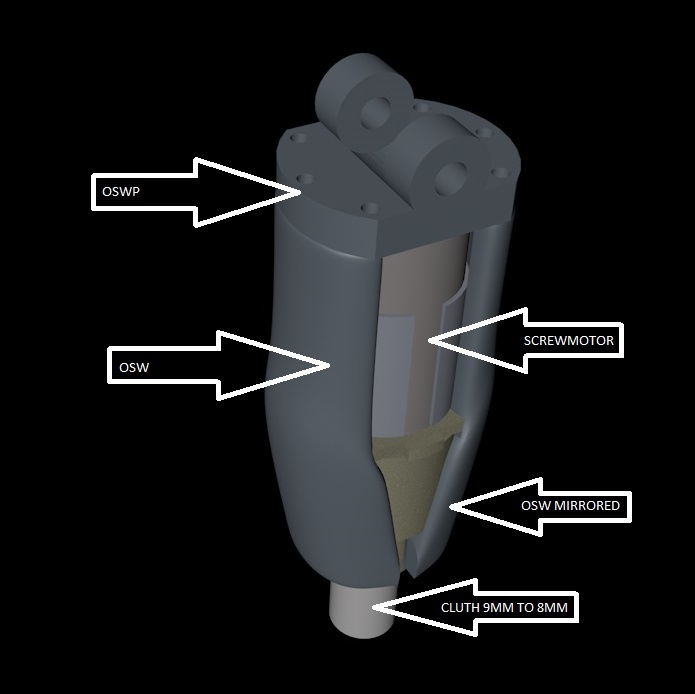
- Некоторые детали требуют зеркального отражения для создания левой ноги.
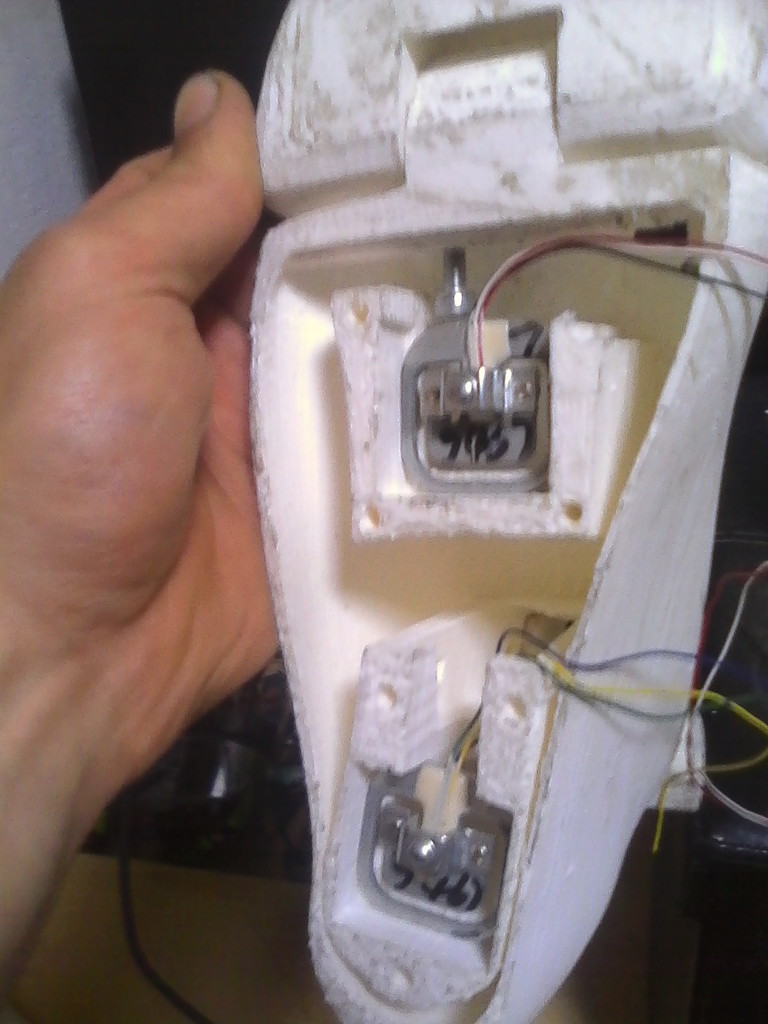
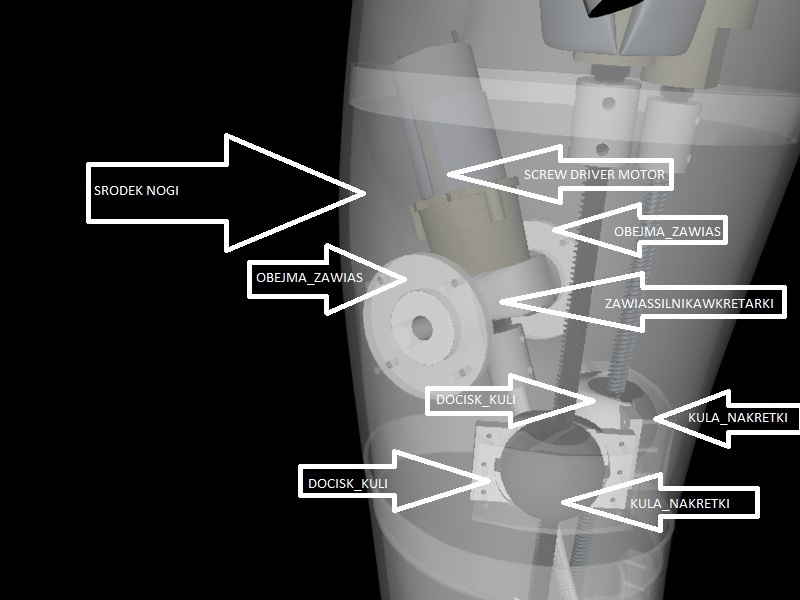
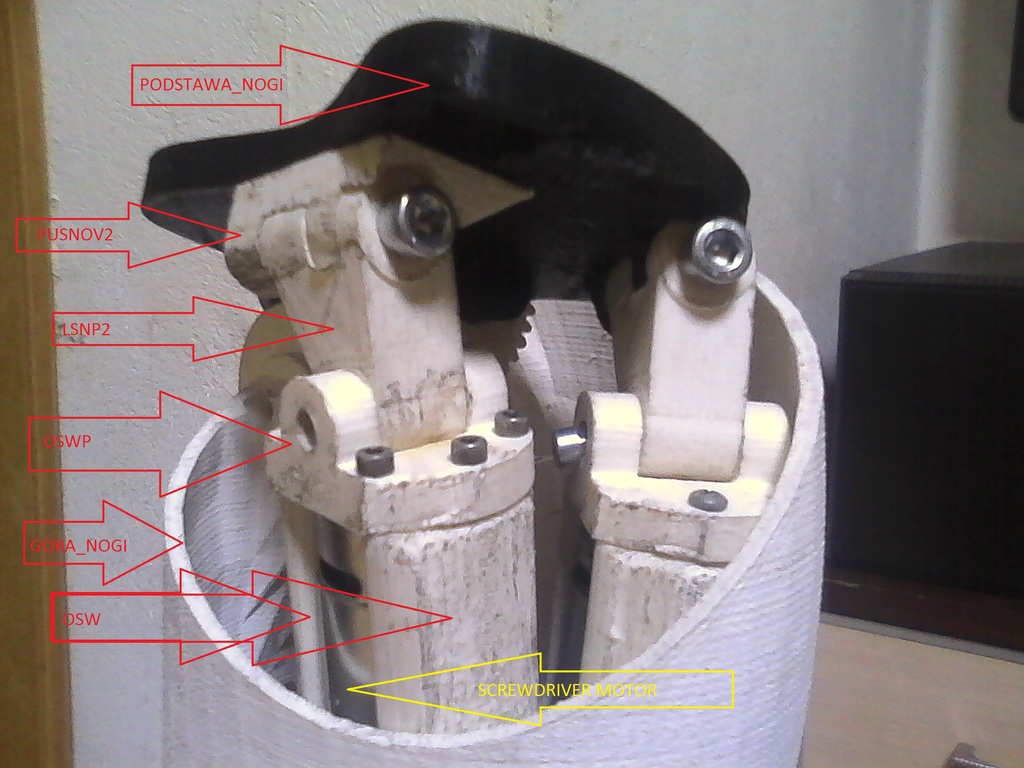
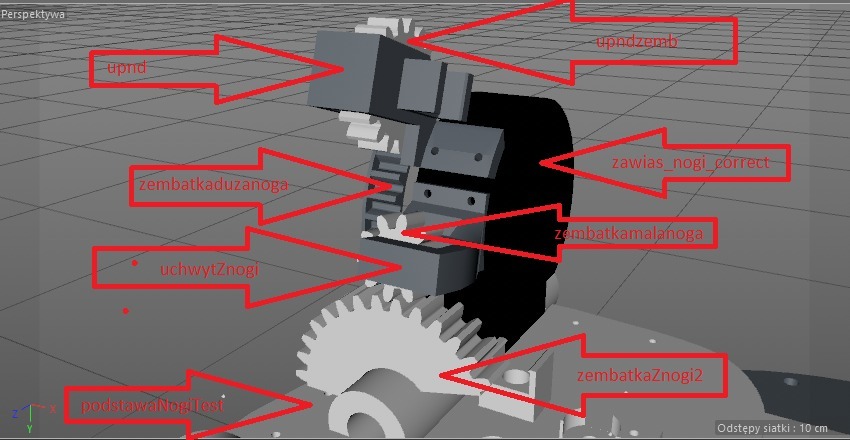
- Печатные детали имеют специальные крепления для двигателей и сервоприводов, обеспечивающие подвижность.
Рекомендации по печати:
- Рекомендуется использовать поддерживающие структуры для сложных частей.
- Минимальная плотность заполнения - 60%, но лучше использовать более высокий процент для улучшения прочности.
- Обратите внимание на размеры деталей и их ориентацию при печати.
-
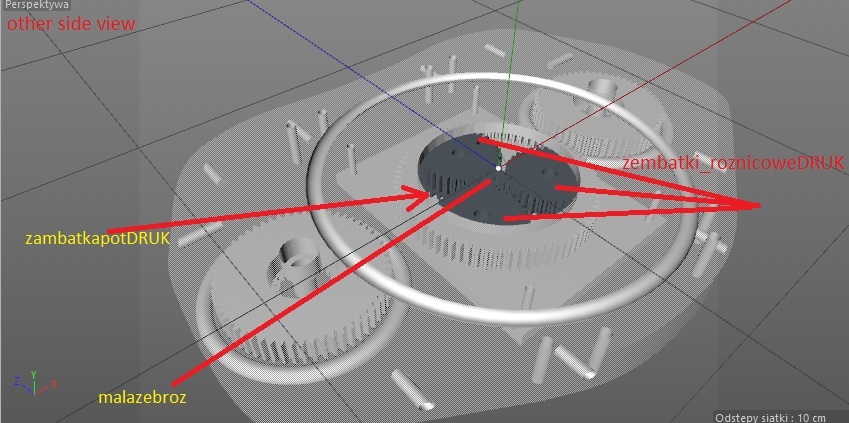
zembatkapotDRUK.stlСкачать
-
oslona_biodra.stlСкачать
-
OSW.stlСкачать
-
zawiassilnikawkretarki.stlСкачать
-
zebatki_roznicoweDRUK.stlСкачать
-
PUSNOV2.stlСкачать
-
srodek_nogi.stlСкачать
-
stopaprzod.stlСкачать
-
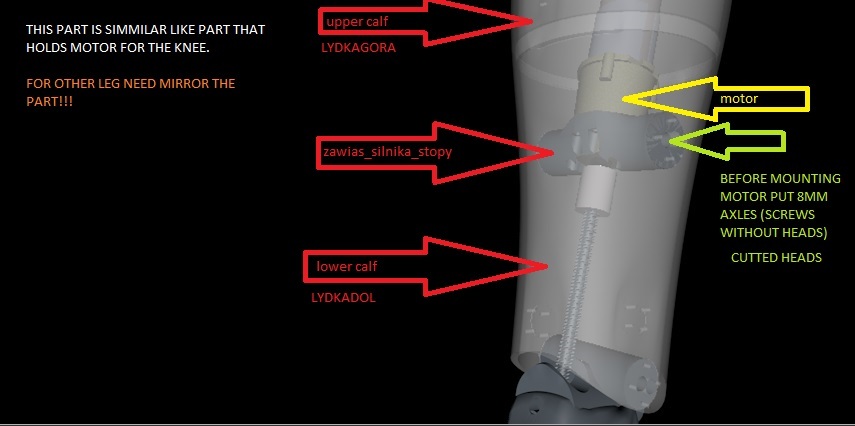
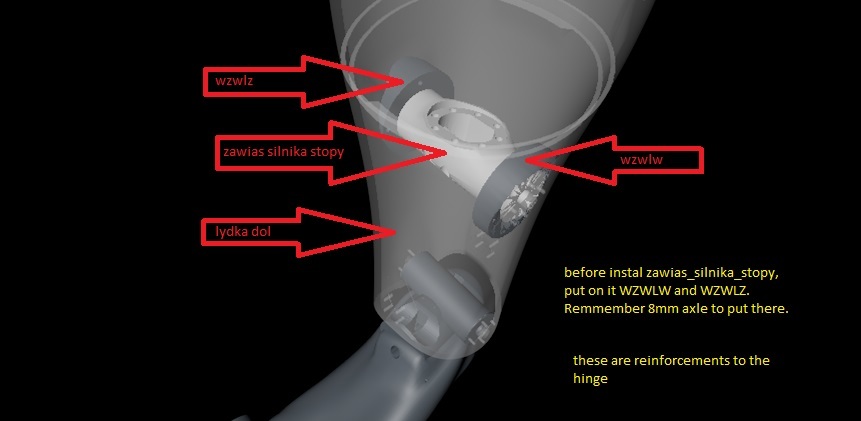
lydkadol.stlСкачать
-
stopaduza.stlСкачать
-
ydkagora.stlСкачать
-
dol_nogi.stlСкачать
-
zawiasstopy.stlСкачать
-
gora_nogi.stlСкачать
-
docisk_kuli.stlСкачать
-
kula_nakretki.stlСкачать
-
zawias_nogi_correct.stlСкачать
-
oswp.stlСкачать
-
obejma_zawias.stlСкачать
-
gora_nogiV2.stlСкачать
-
podstawa_dol.stlСкачать
-
malazebroz.stlСкачать
-
lacznikpodstawDRUK.stlСкачать
-
podstawa.stlСкачать
-
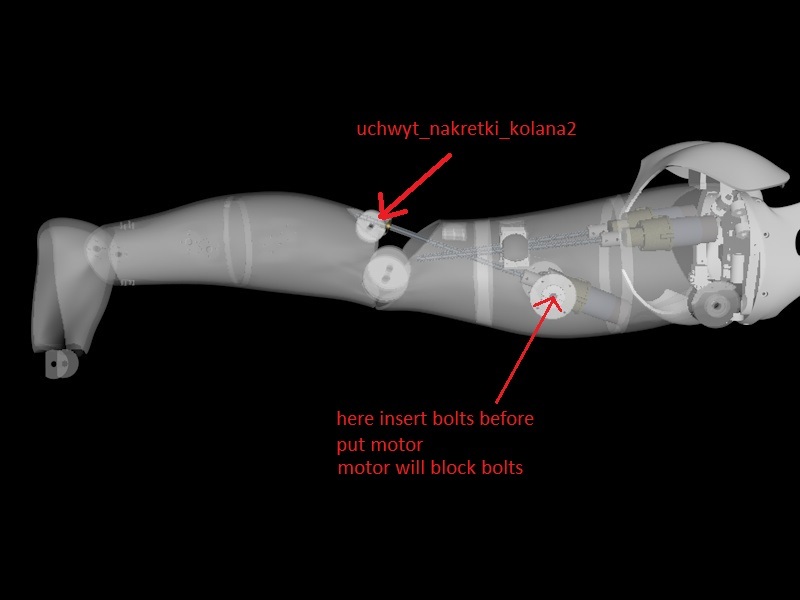
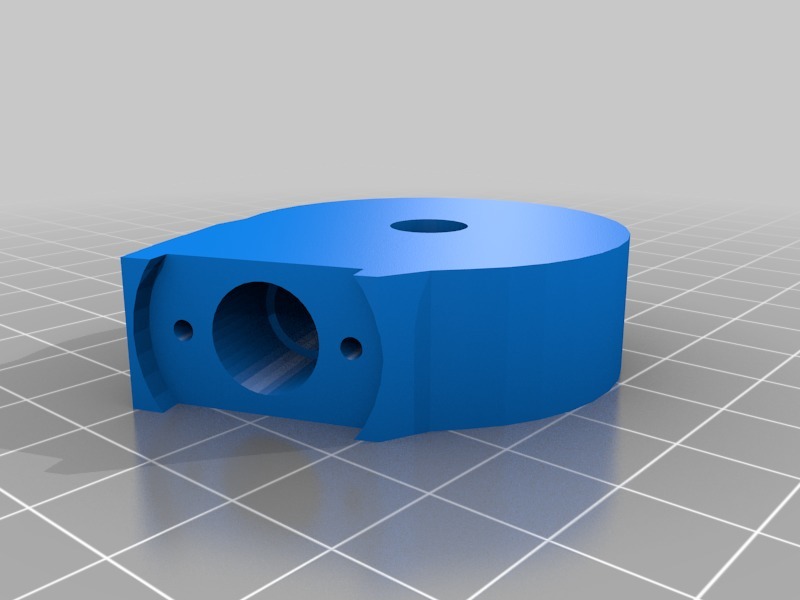
uchwyt_nakretki_kolana2.stlСкачать
-
pokrywadolbrzuch2.stlСкачать
-
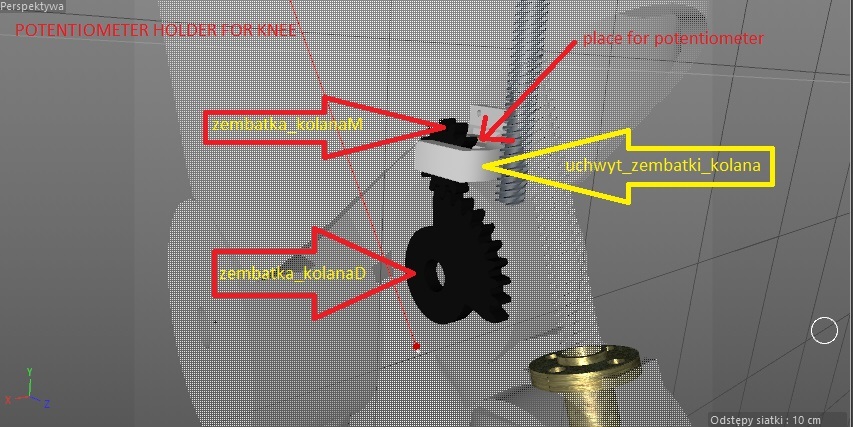
uchwyt_zembatki_kolana.stlСкачать
-
zembatka_kolanaM.stlСкачать
-
zembatka_kolanaD.stlСкачать
-
stopaduzaV2.stlСкачать
-
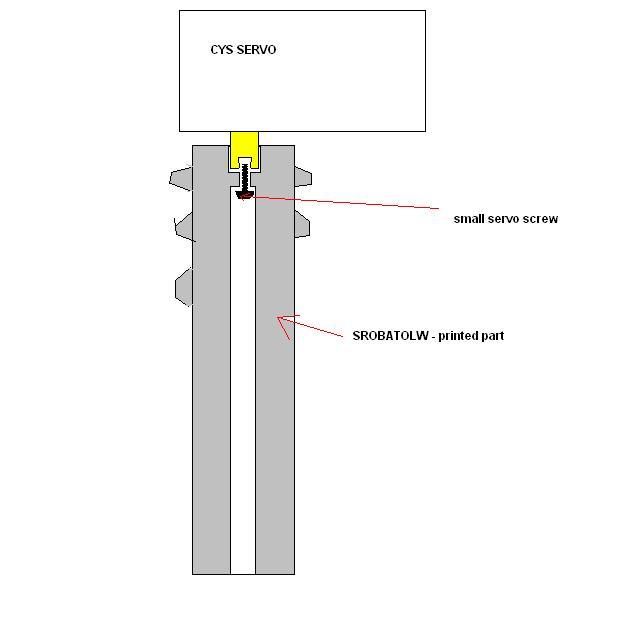
srobatolw.stlСкачать
-
zawiasbrzuch.stlСкачать
-
obejmakulagora.stlСкачать
-
obejma2.2.stlСкачать
-
obejma2.1.stlСкачать
-
obejma2.stlСкачать
-
obejmakuladol.stlСкачать
-
obejmaserwo.stlСкачать
-
wzmocnieniedol.stlСкачать
-
UchwytSB.stlСкачать
-
kula_nakretki_brzucha.stlСкачать
-
podstawa_nogi_test.stlСкачать
-
lsnp2.stlСкачать
-
majtkiV2.stlСкачать
-
tylek.stlСкачать
-
upnd.stlСкачать
-
UchwytZnogi.stlСкачать
-
upndzemb.stlСкачать
-
zembatkaZnogiD2.stlСкачать
-
zembatduzanoga.stlСкачать
-
zembatkamalanoga.stlСкачать
-
ZembatkaNogaObrot.stlСкачать
-
zembServNogaObrot.stlСкачать
-
zembNogaPlanetObrot.stlСкачать
-
zawias_silnika_stopy.stlСкачать
-
wzwlw.stlСкачать
-
wzwlz.stlСкачать
-
kula_nakretki_brzucha2.stlСкачать
Для добавления комментариев необходимо войти.
Информация
- Автор: admin
- Дата: 10.12.2025
- Категория: Хобби и Радиоуправление
- Просмотров: 95
- Загрузок: 1111
- Лайков: 0
- Изображений: 141
- Файлов: 58
Скачать ZIP
Автор модели

×
❮
![]() ❯
❯