Платформа для розробки самобалансуючого робота
admin | 10.12.2025
3D Попередній перегляд
Завантаження 3D моделі...
ЛКМ: Обертання | Колесо: Зум | ПКМ: Переміщення
Галерея (34)


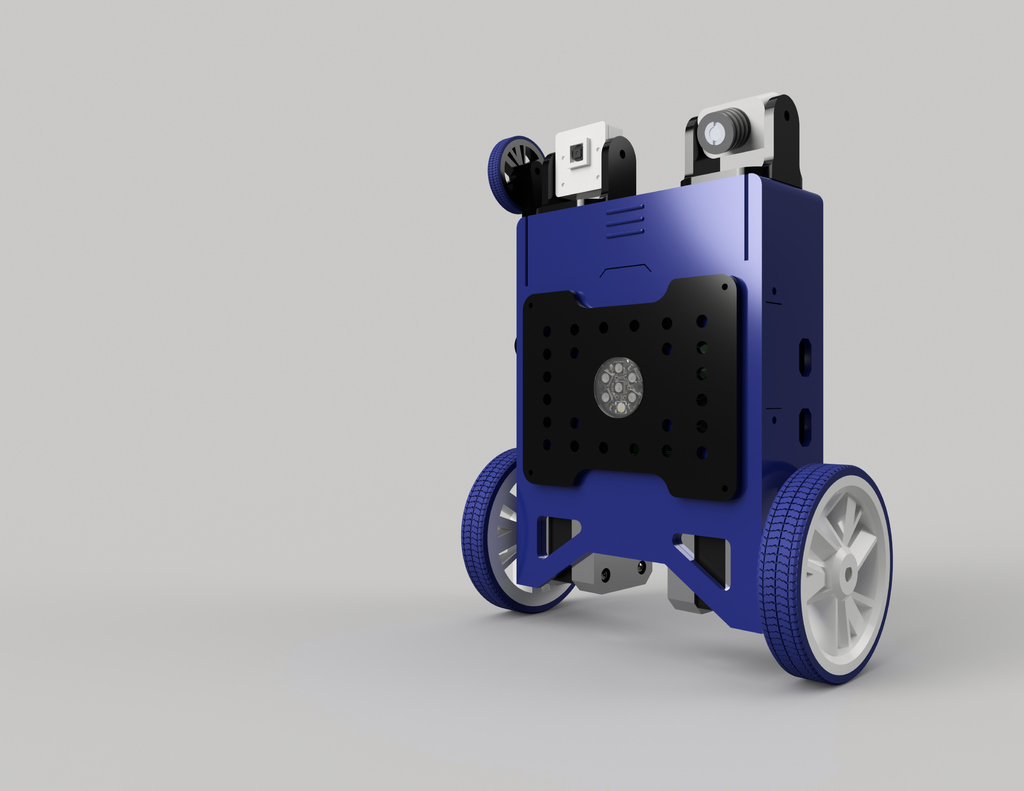

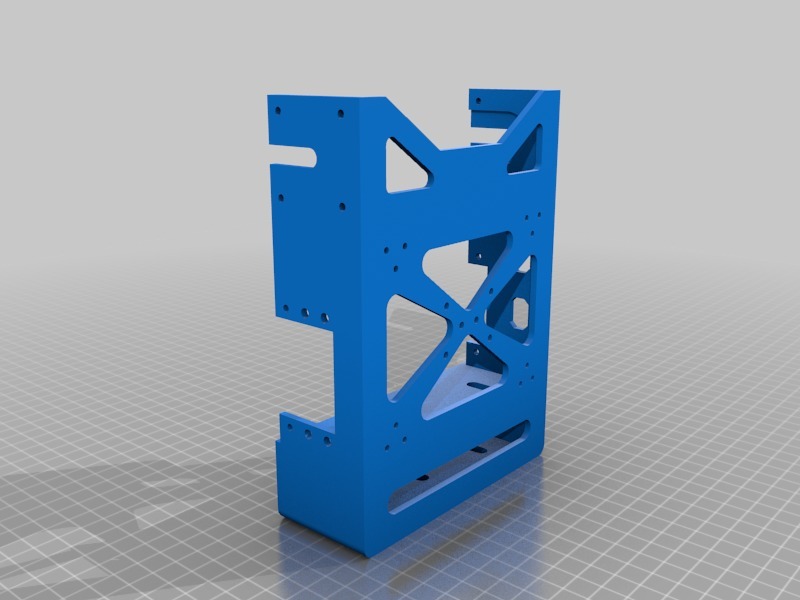
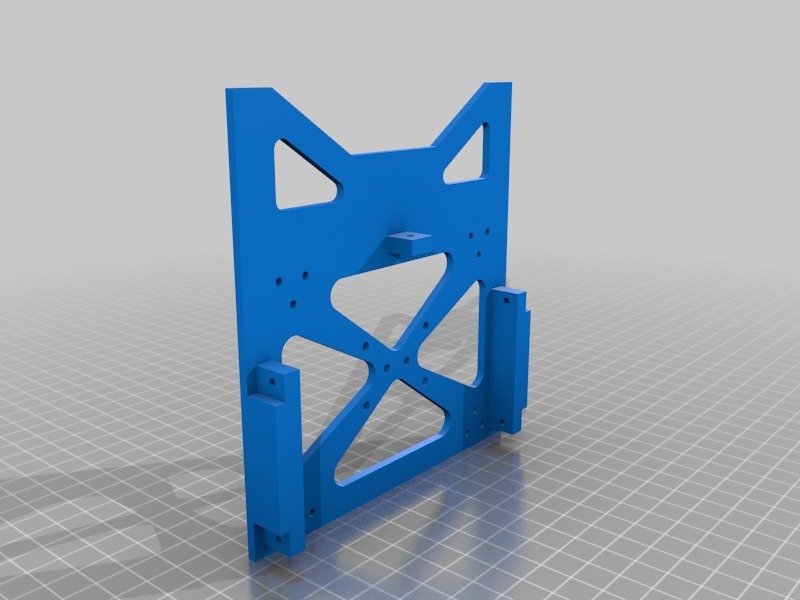

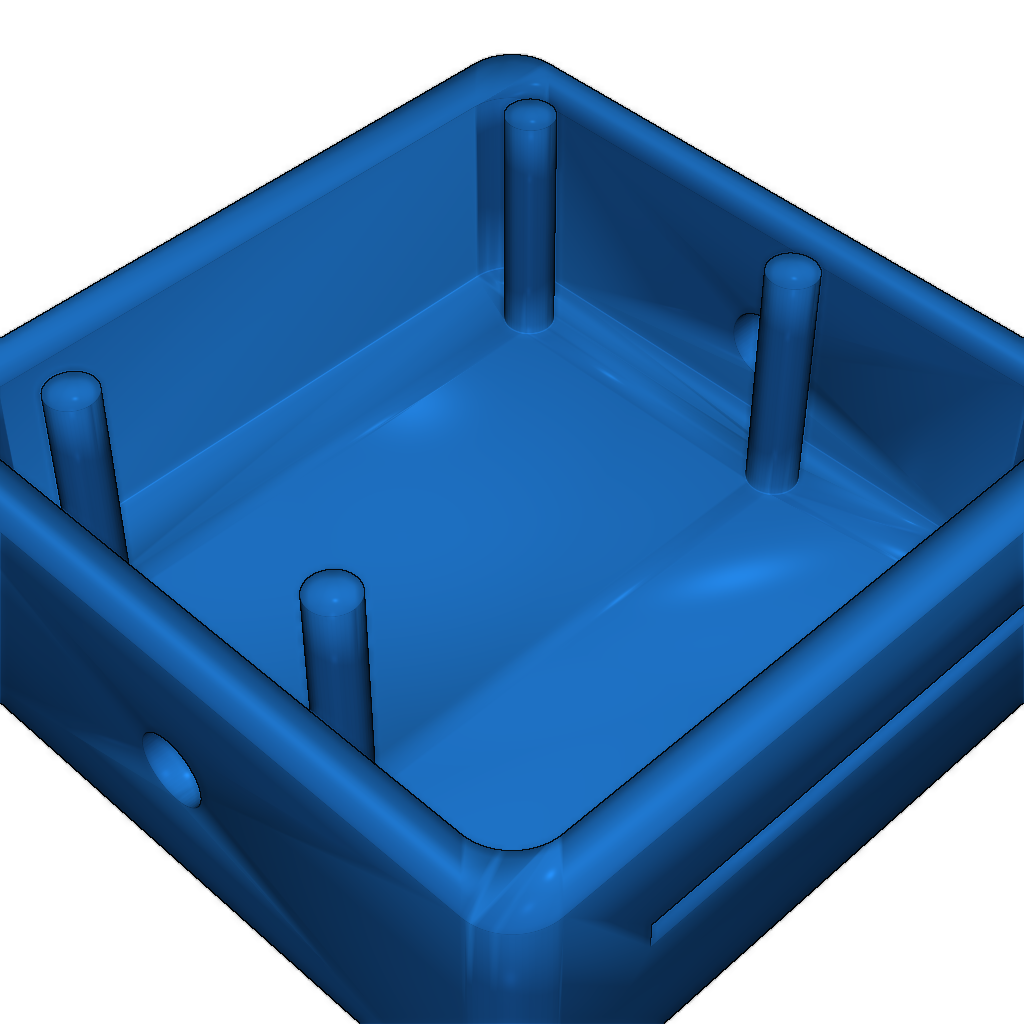

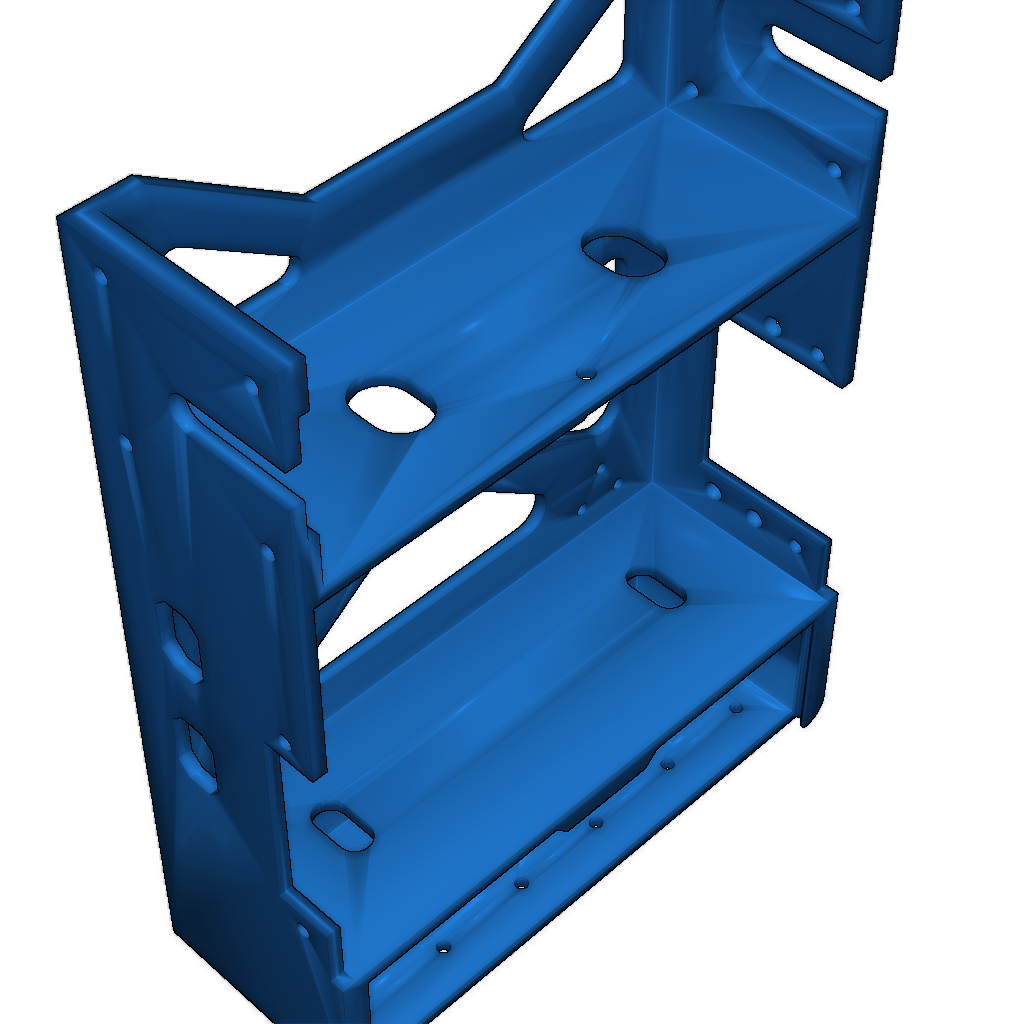
Ця 3D-модель є платформою для розробки самобалансуючого робота, створеною з урахуванням модульності, що дозволяє налаштовувати її для різних цілей.
Використання: Платформа призначена для створення роботів, включаючи телеприсутність, і може використовуватися в різноманітних проектах з додаванням електроніки та сенсорів.
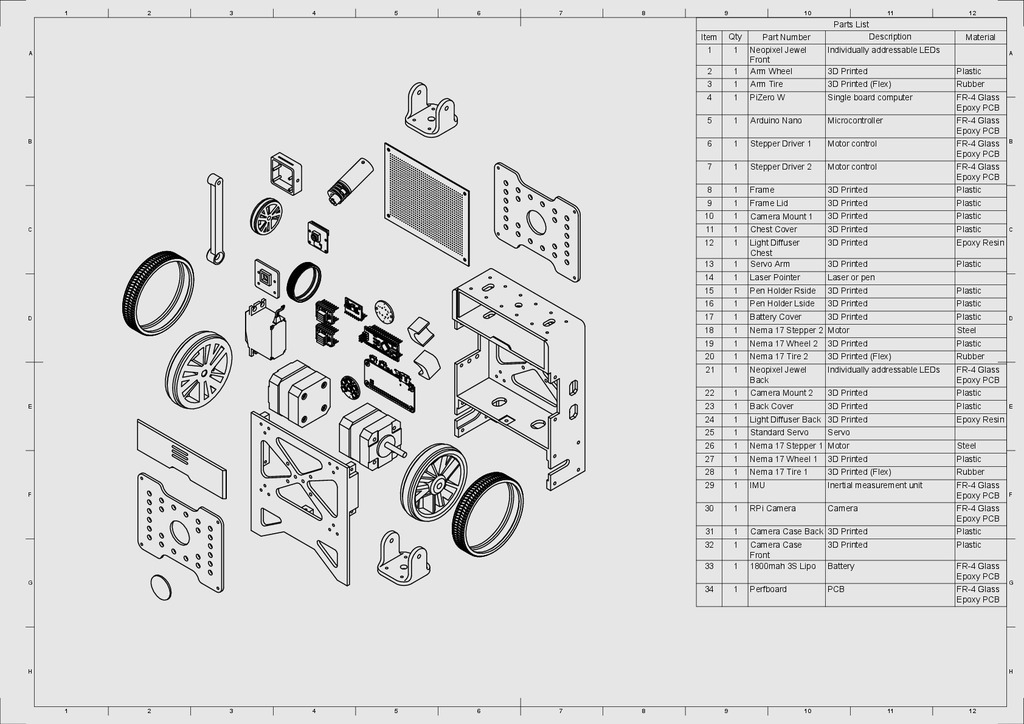
Особливості конструкції:
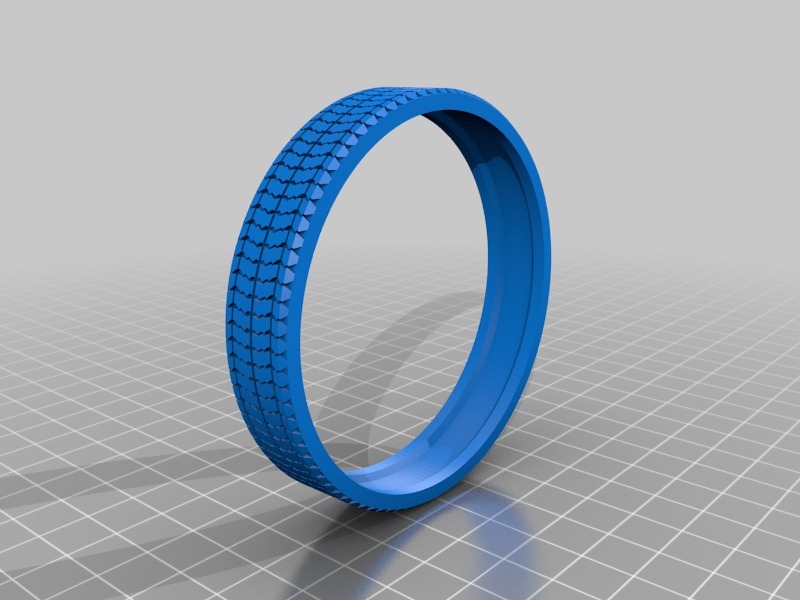
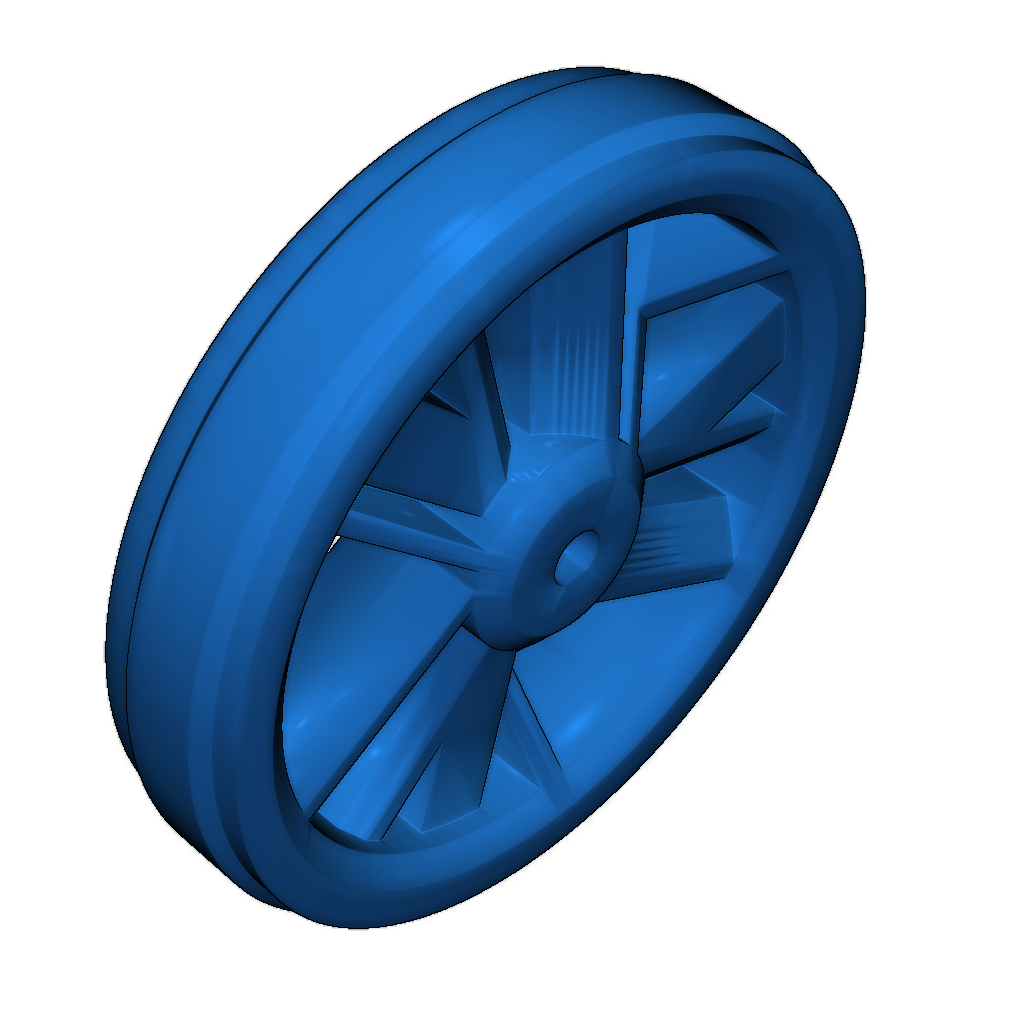
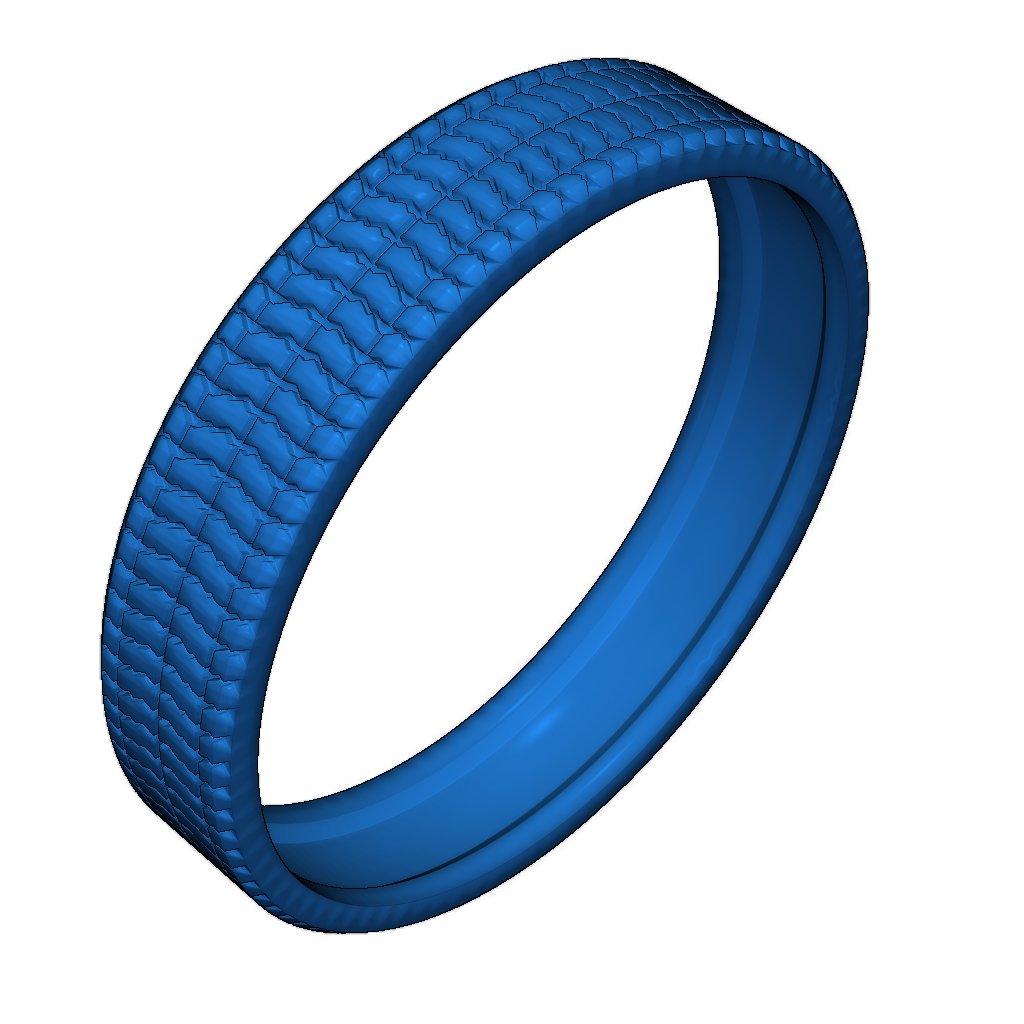
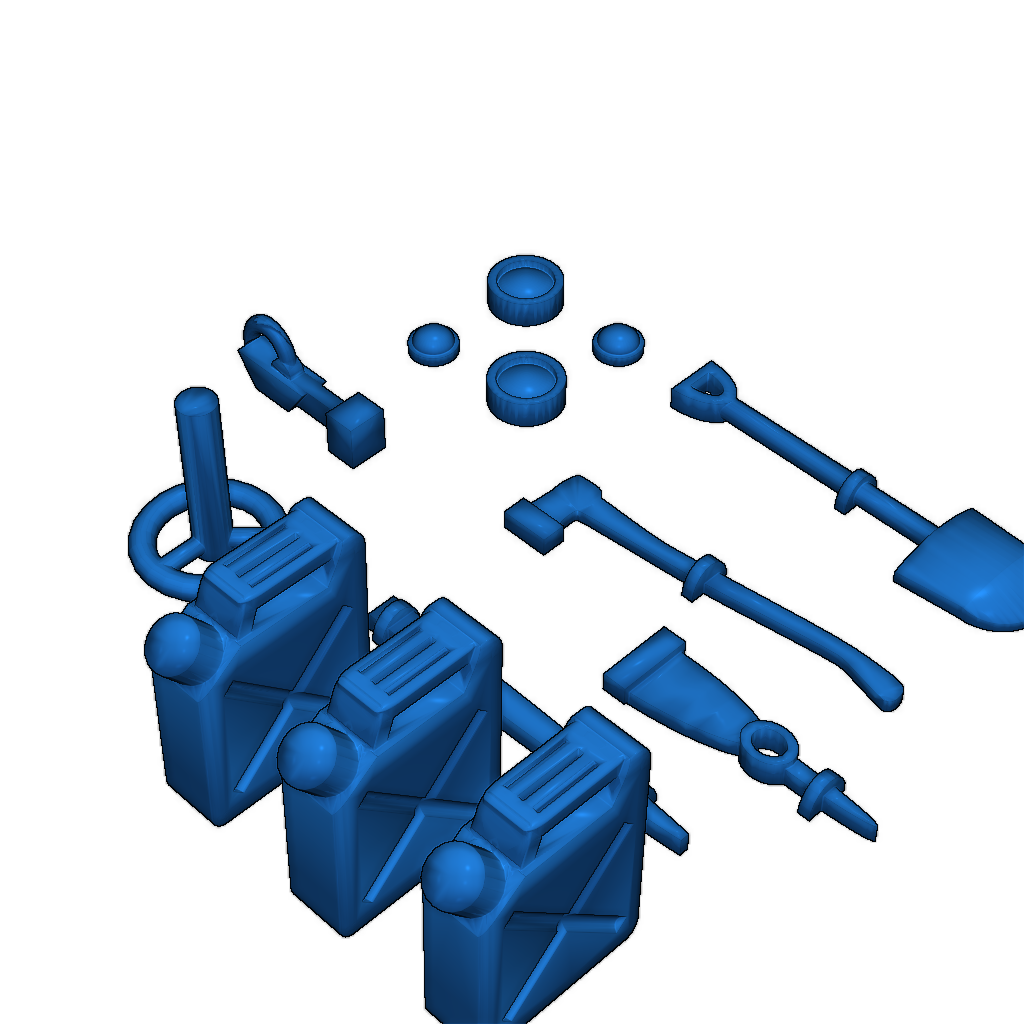
- Всі деталі виконані з урахуванням стандартних допусків для PLA, крім шин, які слід друкувати з TPU або іншого гнучкого матеріалу.
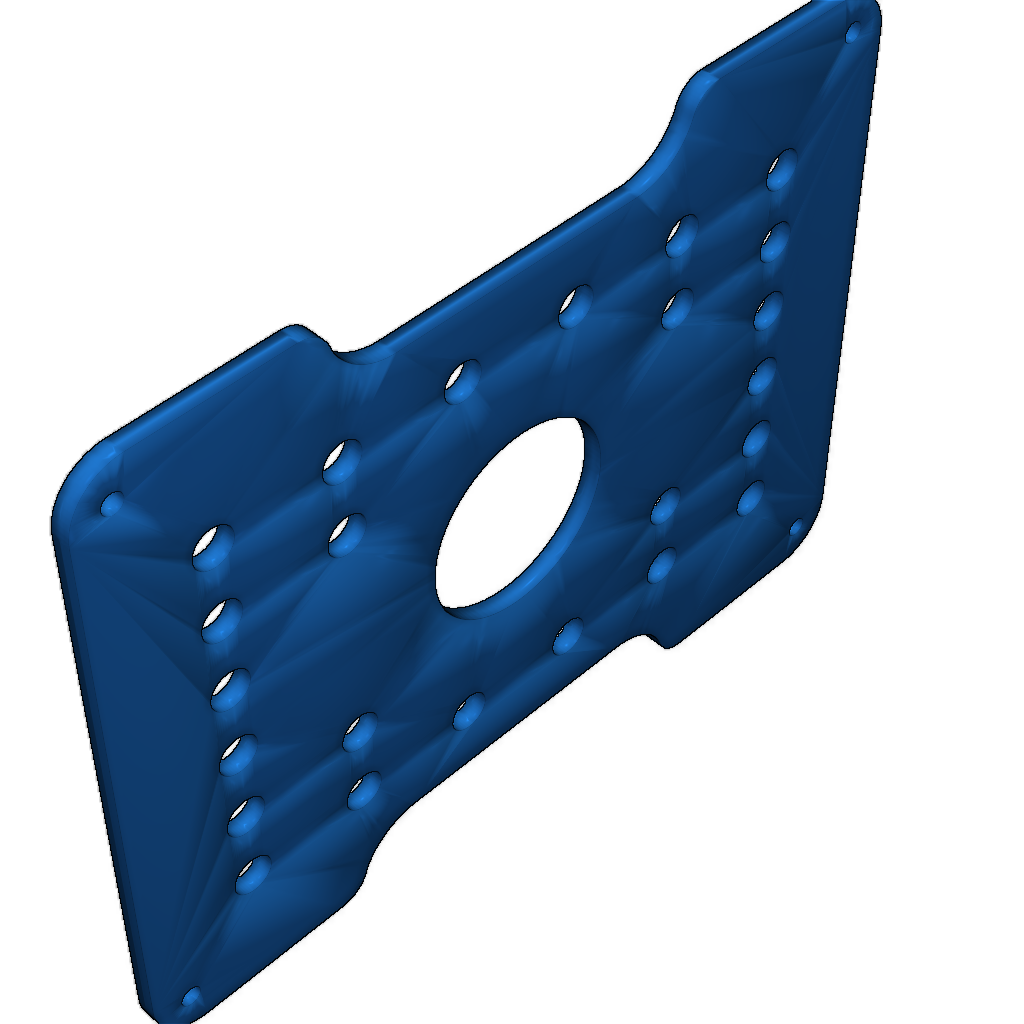
- Більшість отворів мають діаметр 2.5 мм для болтів M3.
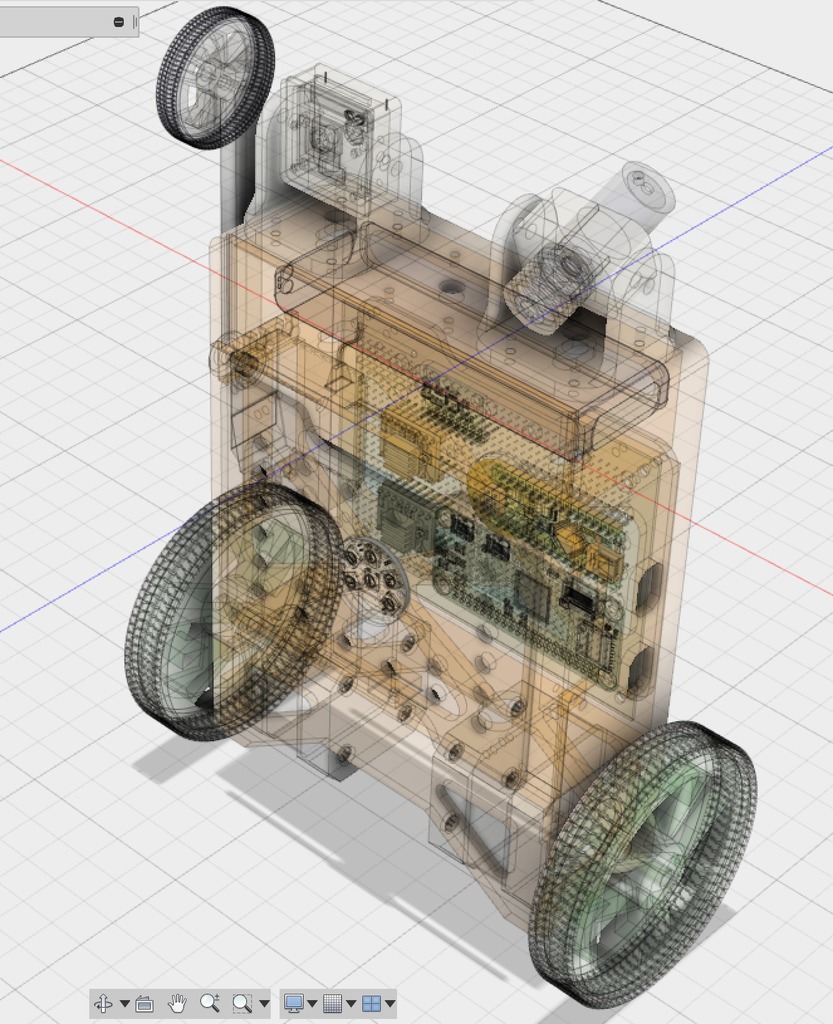
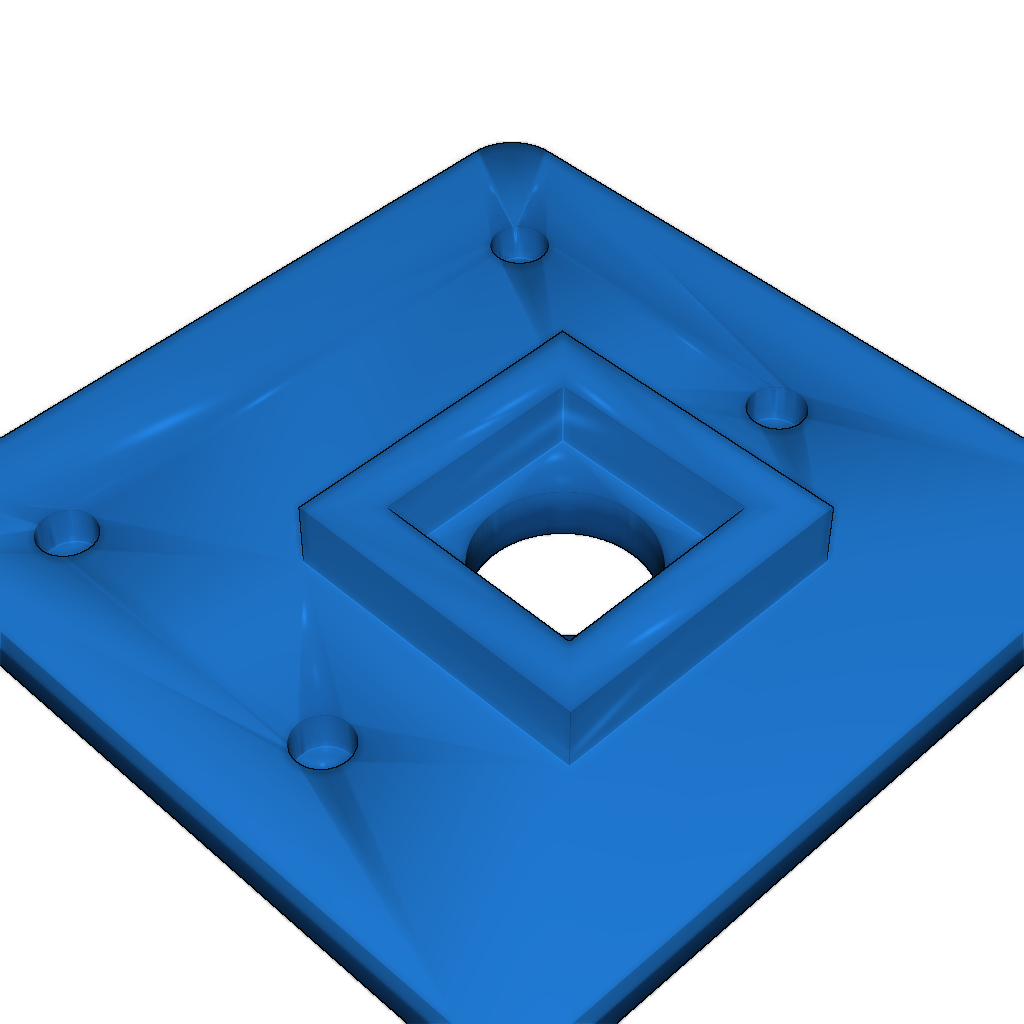
- Є достатньо місця для встановлення Raspberry Pi Zero W, Arduino Nano, крокових двигунів, сервоприводів, маленької камери та інших компонентів.
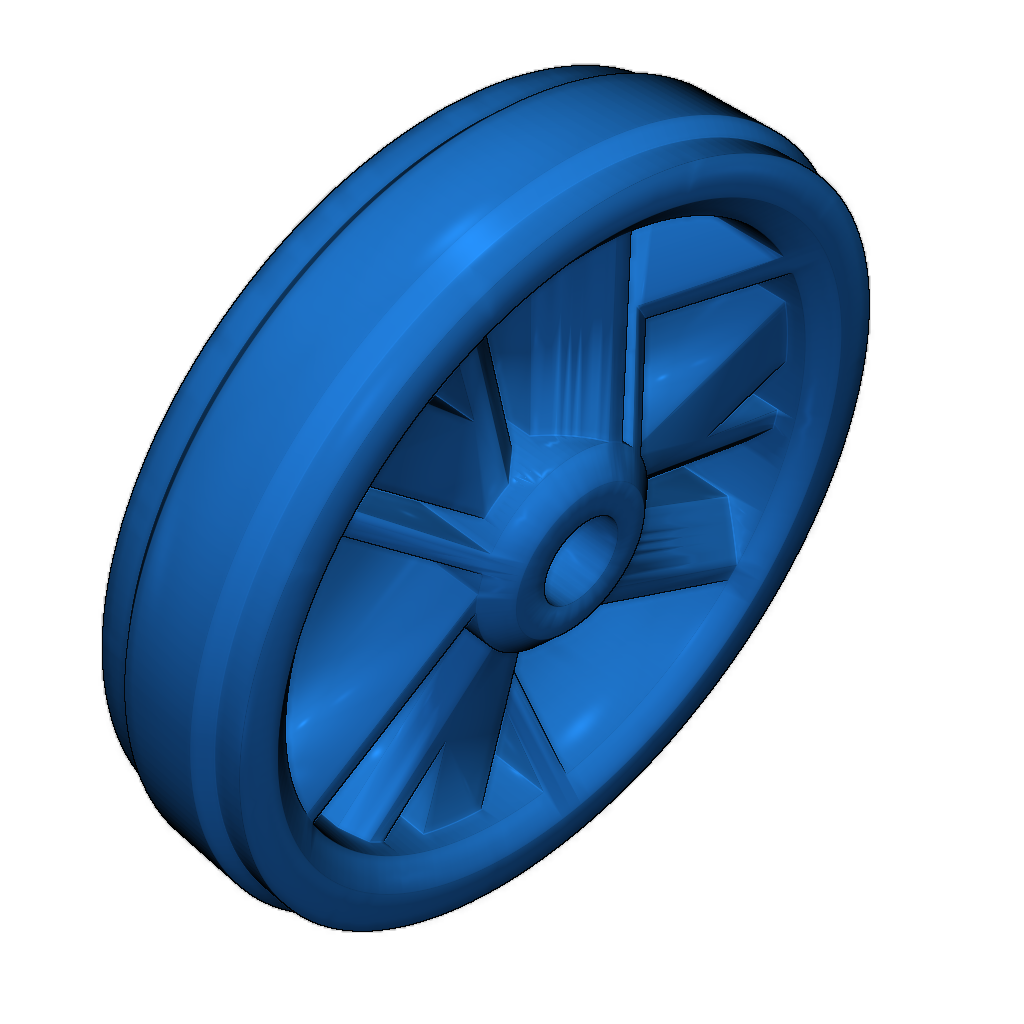
Рекомендації щодо друку: Рекомендується друкувати колеса та шини з PLA, щоб забезпечити щільне з'єднання, дозволяючи вставляти колеса на вісь без використання інструментів або клею.
-
Self_Balancing_Robot_Assembly_Drawing_v2.pdfСкачати
-
Servo_Arm.stlСкачати
-
Frame_Lid.stlСкачати
-
Camera_Mount.stlСкачати
-
Battery_Cover.stlСкачати
-
Camera_Case_Back.stlСкачати
-
Pen_Holder_PRINT_TWICE.stlСкачати
-
Nema_17_Wheel_PRINT_TWICE.stlСкачати
-
Nema_17_Tire_PRINT_TWICE.stlСкачати
-
Light_Diffuser_PRINT_TWICE.stlСкачати
-
Arm_Tire.stlСкачати
-
Chest_and_Back_Cover_PRINT_TWICE.stlСкачати
-
Camera_Case_Front.stlСкачати
-
Arm_Wheel.stlСкачати
-
Frame.stlСкачати
-
Self_Balancing_Robot_Development_Platform_Version_1.1_by_Flux_Axiom.f3dСкачати
Для додавання коментарів необхідно увійти.
Інформація
- Автор: admin
- Дата: 10.12.2025
- Категорія: Хобі та Радіокеровані моделі
- Переглядів: 131
- Завантажень: 355
- Вподобайок: 0
- Зображень: 34
- Файлів: 16
Скачати ZIP
Автор моделі
Схожі моделі



Ви нещодавно переглядали

×
❮
![]() ❯
❯