3D напечатанная роботизированная рука
admin | 05.12.2025
3D Предпросмотр
Загрузка 3D модели...
ЛКМ: Вращение | Колесо: Зум | ПКМ: Перемещение
Галерея (17)
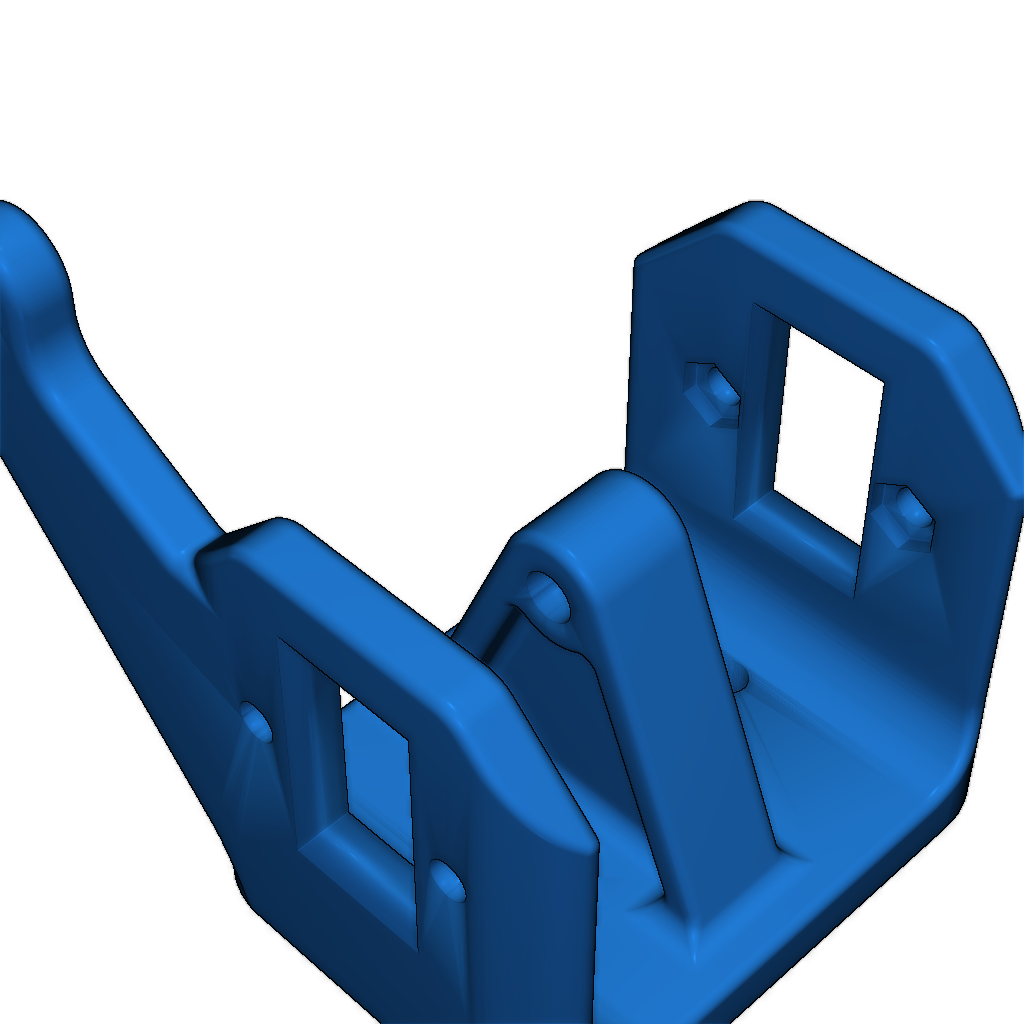


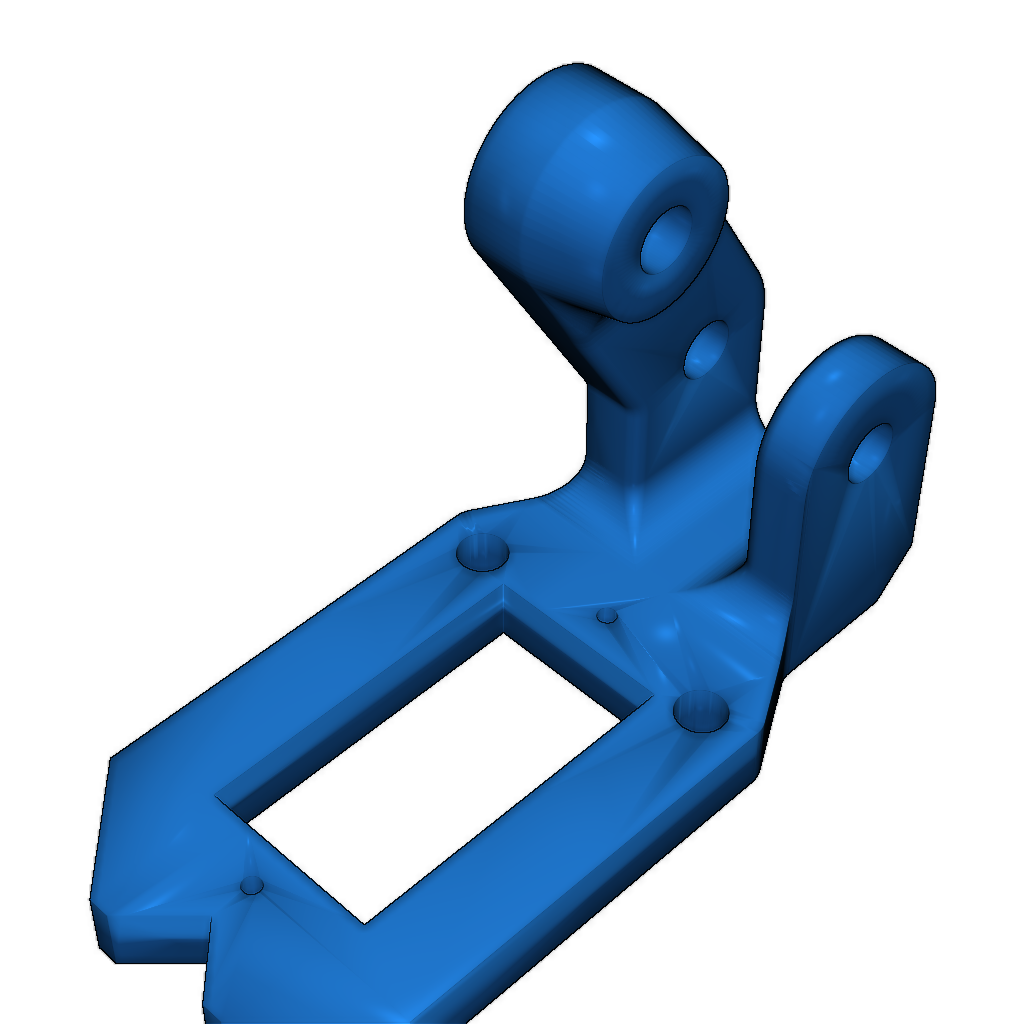
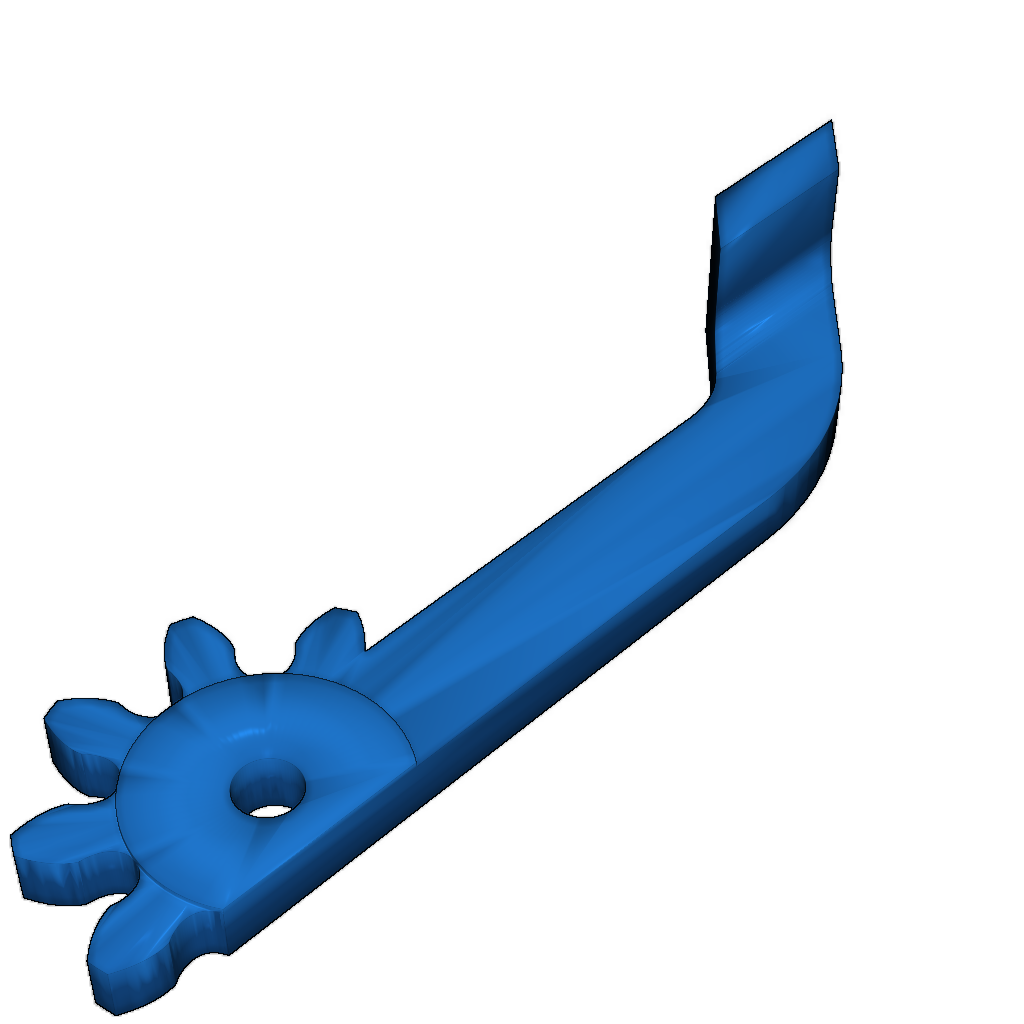
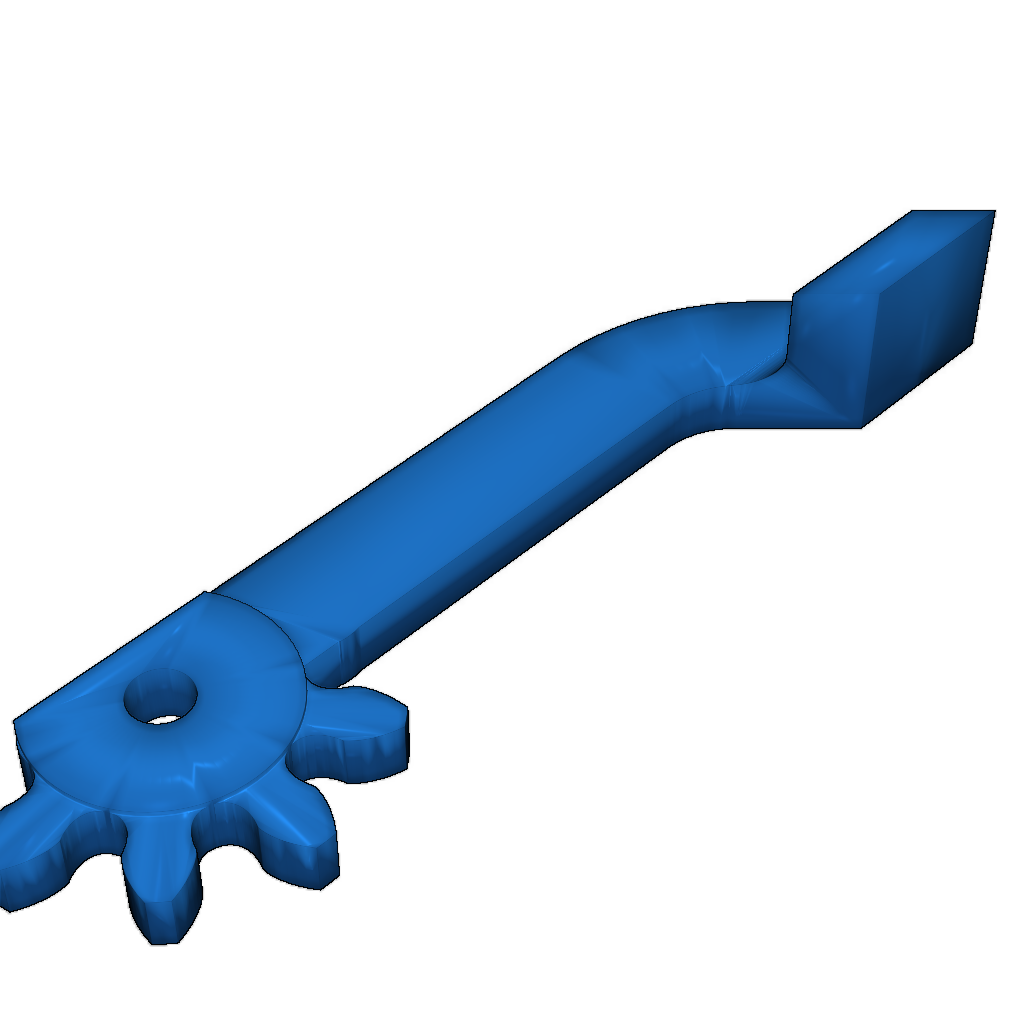
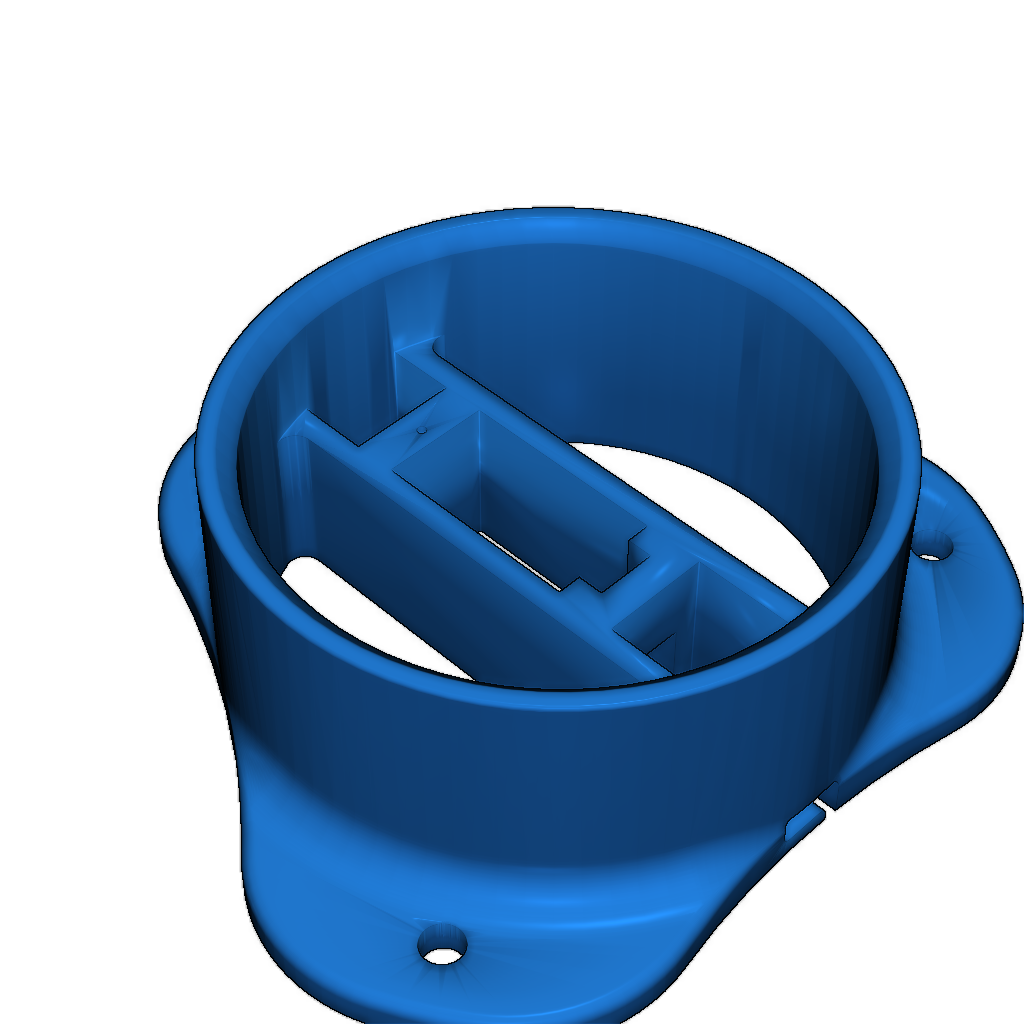
Данная 3D модель представляет собой роботизированную руку, разработанную с акцентом на простоту сборки и визуальный эффект.
Ключевые особенности:
- Оригинальная кинематика и переработанные детали, включая захват.
- Использование винтов M4 с круглой головкой для всех соединений.
- Для вертикальных элементов предпочтителен более высокий уровень точности с использованием латунных труб.
- Первоначальные испытания проводились с сервоприводами SG90, затем заменены на MG90 с металлическими шестернями для большей прочности.
- Эксперименты с управлением через Arduino с использованием различных методов, включая джойстик и Wii Nunchuk.
- Рекомендуется контроллер от Pololu для легкости управления сервоприводами.
Ссылка на контроллер: Pololu servo controller
-
EBA_01.00.001.STLСкачать
-
EBA_01.00.002_vertical_drive_arm.STLСкачать
-
EBA_01.00.009_servo_plate.STLСкачать
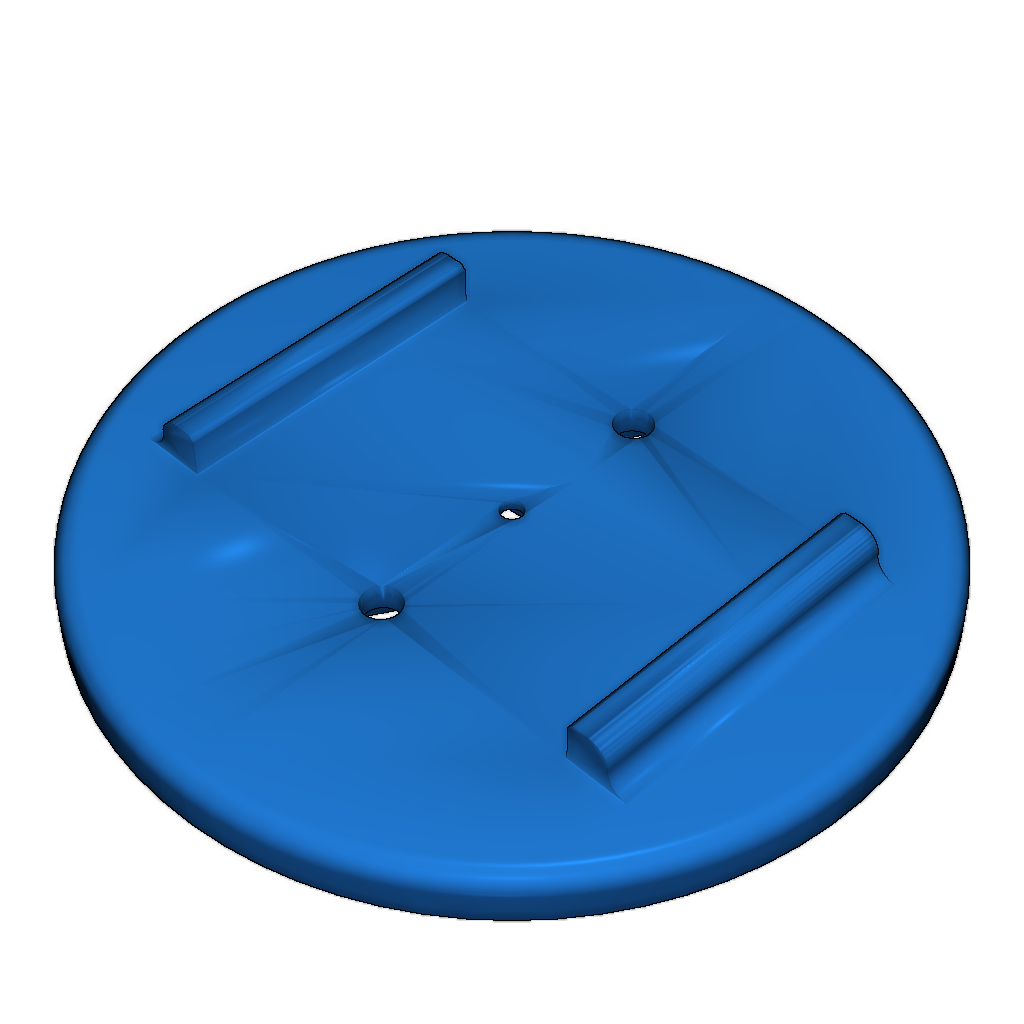
-
EBA_01.00.011_round_plate.STLСкачать
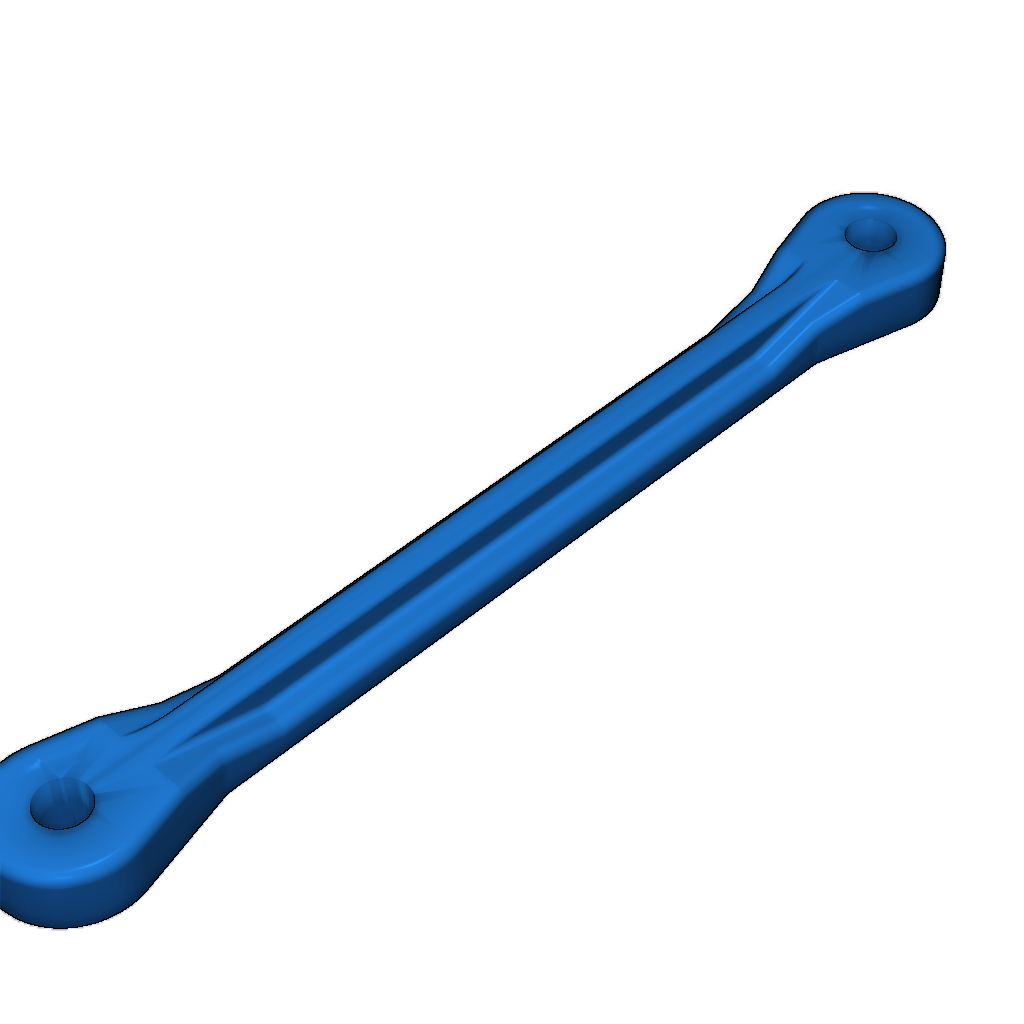
-
EBA_01.00.003_link.STLСкачать
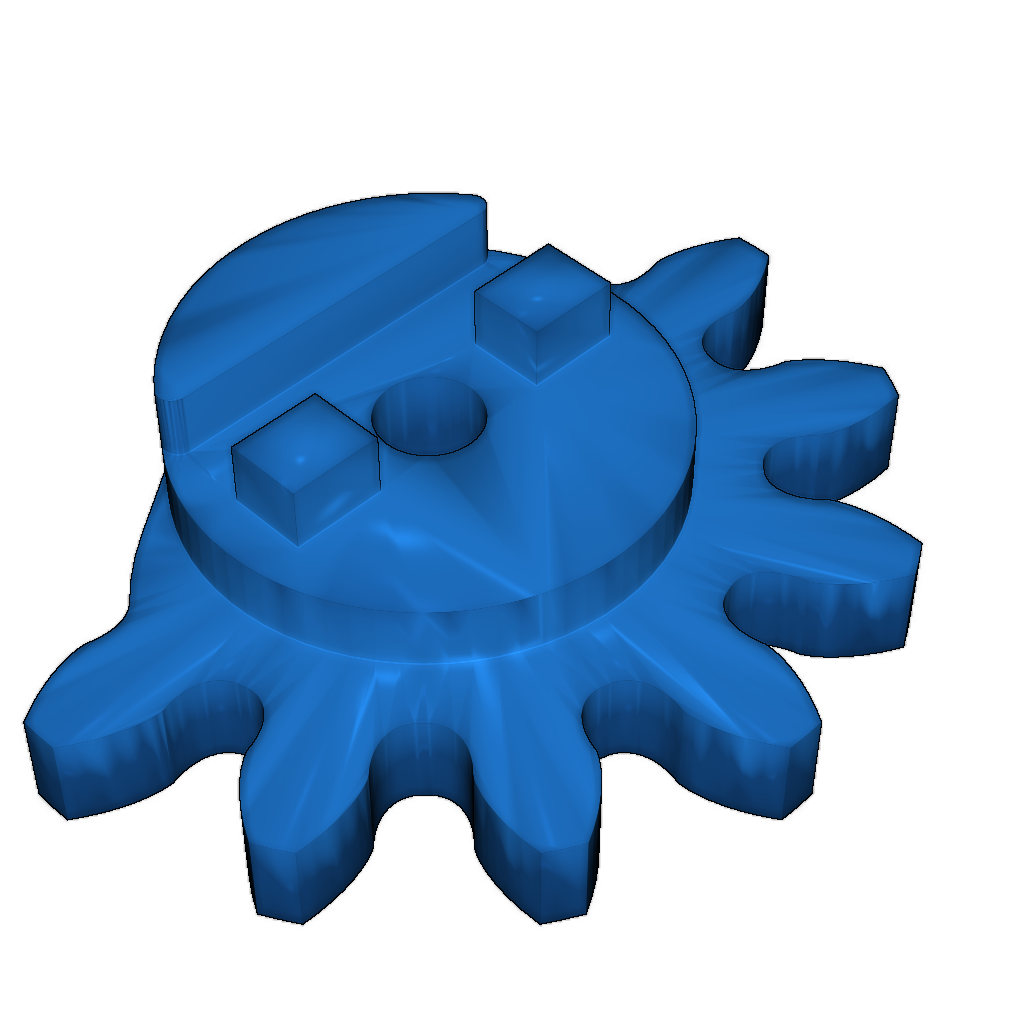
-
EBA_01.00.016_R01_driven_gear.STLСкачать
-
EBA_01.00.012_R01_claw_support.STLСкачать
-
EBA_01.00.013_R01_right_finger.STLСкачать
-
EBA_01.00.014_R01_left_finger.STLСкачать
-
EBA_01.00.010_basement.STLСкачать
-
EBA_01.00.006_triangular_link.STLСкачать
-
EBA_01.00.015_drive_gear.STLСкачать
-
EBA_01.00.018_maestro_holder.STLСкачать
-
EBA_01.00.005_horizontal_arm.STLСкачать
-
EBA_01.00.004_forward_drive_arm.STLСкачать
-
EBA_01.00.017_R01_ramp.STLСкачать
-
EBA_01.00.019_ball.STLСкачать
Для добавления комментариев необходимо войти.
Информация
- Автор: admin
- Дата: 05.12.2025
- Категория: Хобби и Радиоуправление
- Просмотров: 101
- Загрузок: 363
- Лайков: 0
- Изображений: 17
- Файлов: 17
Скачать ZIP
Автор модели
Похожие модели






×
❮
![]() ❯
❯