3D-друкований роботизований маніпулятор MK2
admin | 05.12.2025
3D Попередній перегляд
Завантаження 3D моделі...
Галерея (22)
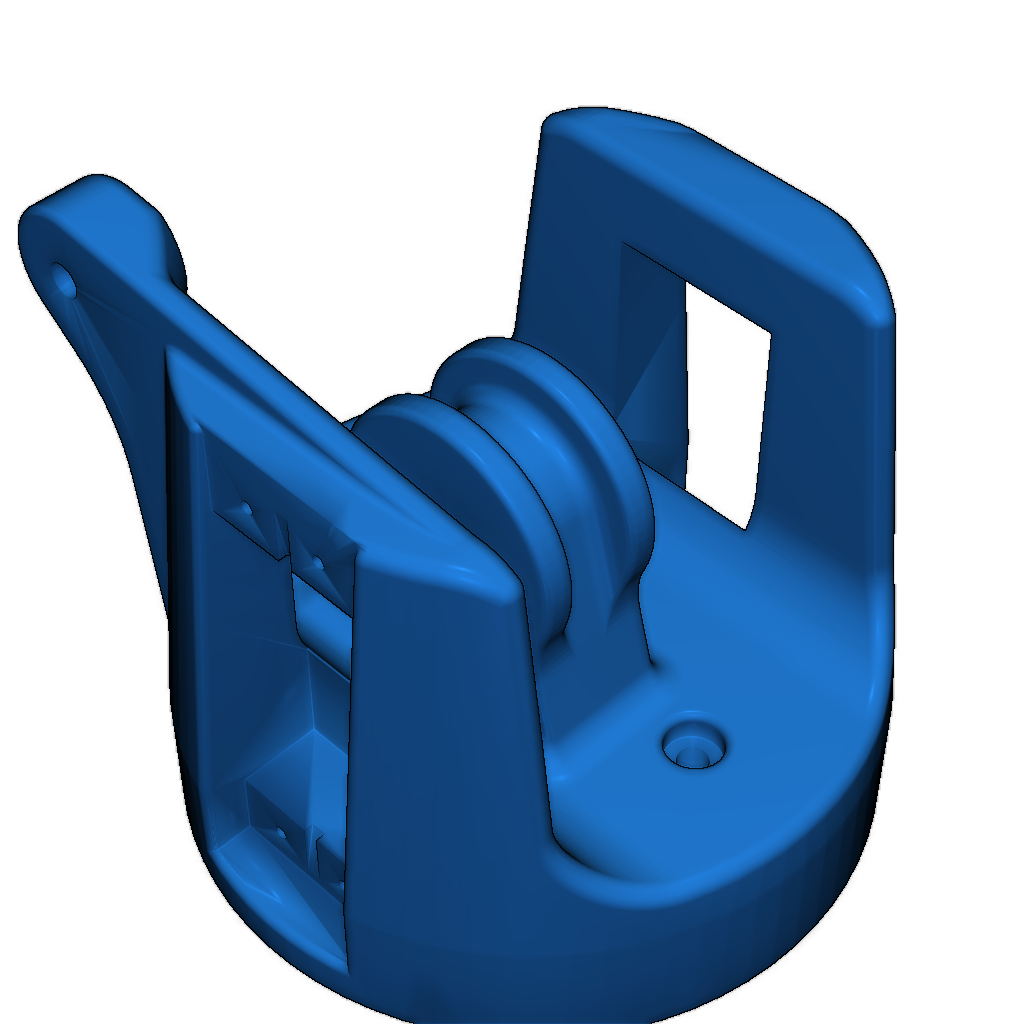

Це 3D-друкований роботизований маніпулятор, вдосконалена версія мого попереднього меншого пристрою EEZYbotARM, названого MK2 (make 2).
Він трохи більший і потужніший, що дозволяє йому мати прийнятну вантажопідйомність. Маніпулятор призначений для освітніх цілей, забезпечуючи підходящу апаратну платформу для вивчення його потенційних застосувань.
Основні характеристики:
- Кінематична структура, зменшена копія ABB IRB460 з соотношенням 1:7.
- Снімний затиск з швидкознімним з'єднанням.
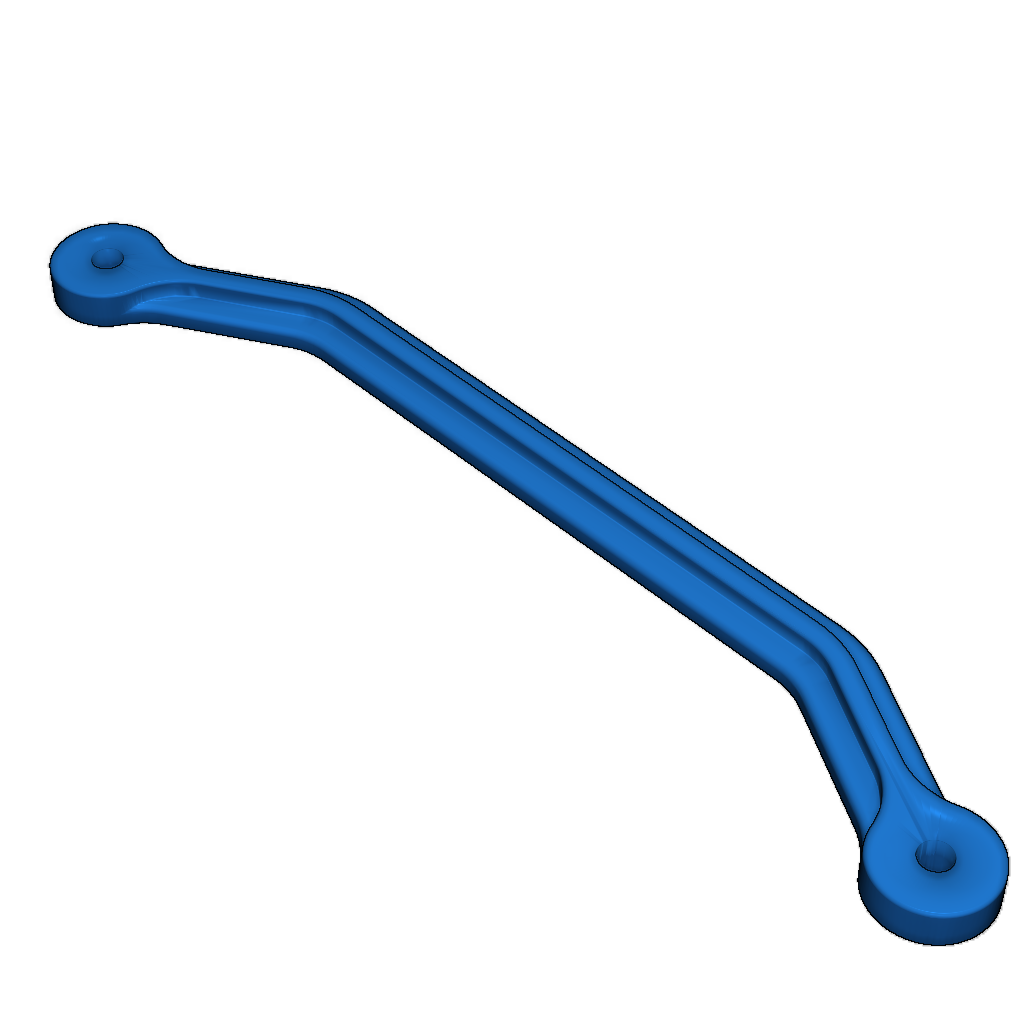
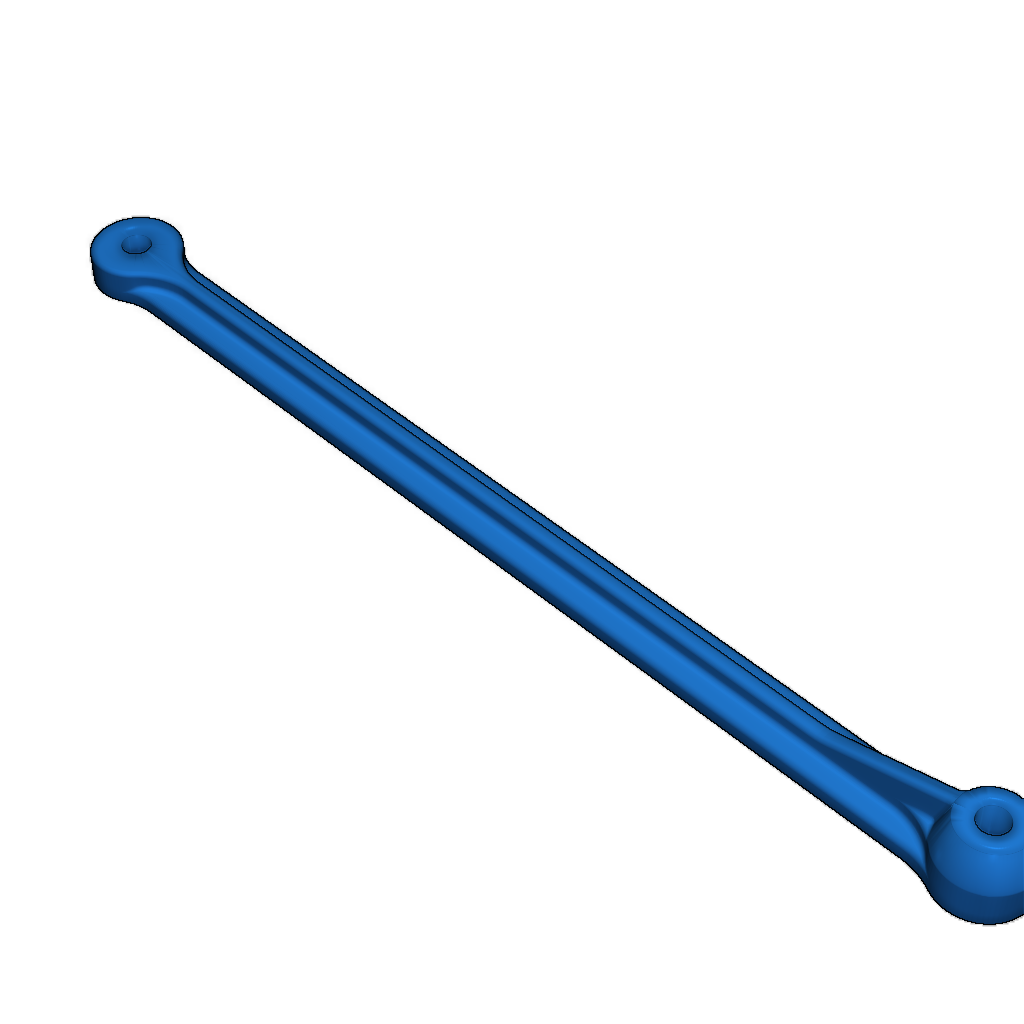
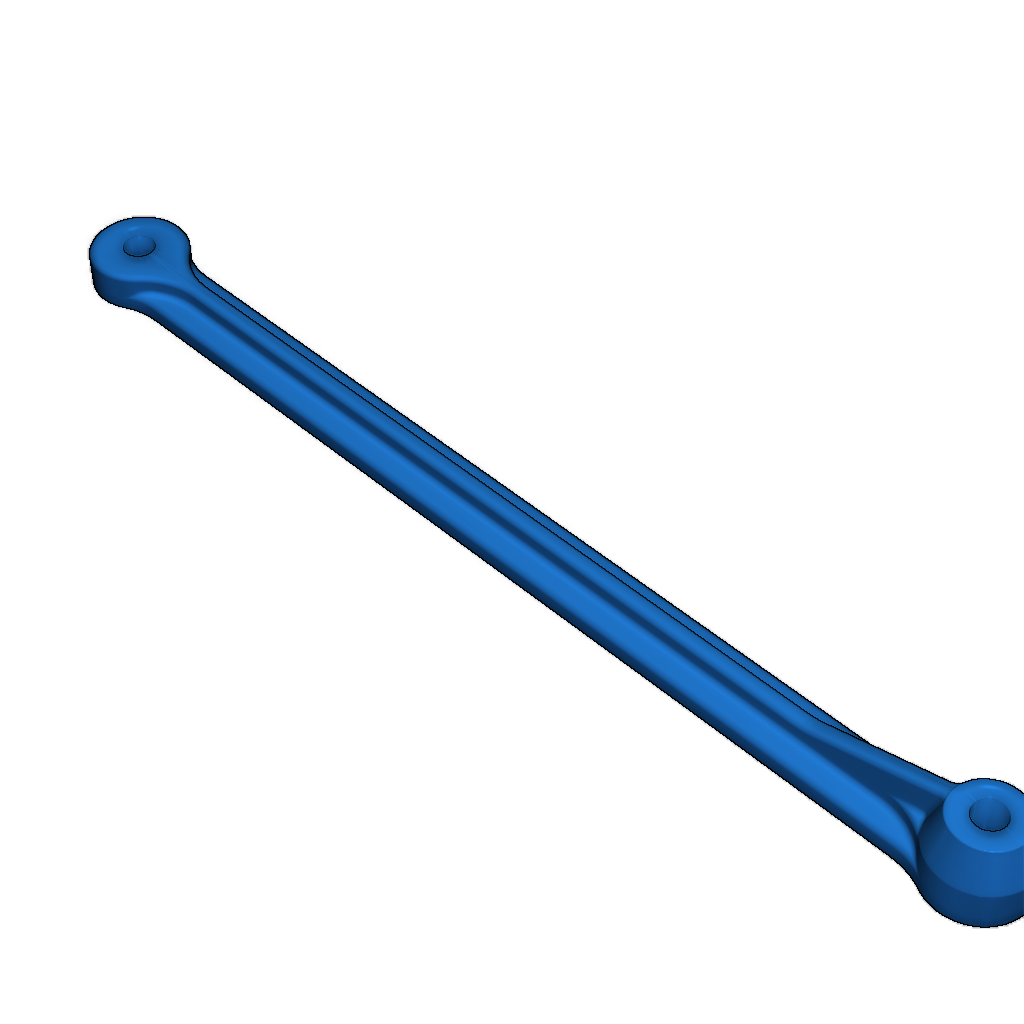
- Внутрішній кабельний маршрут у основних великих руках.
- Вертикальна вісь, підтримувана сферами.
Також розглядається необхідність додавання противаги або балансувальної пружини для основного маніпулятора.
Список не надрукованих частин:
- 3 шт. сервомоторів 995 або 946
- 1 шт. сервомотора SG90
- 1 шт. самозаблокованої гайки M6
- 1 шт. гвинта M6x25
- 2 шт. самозаблокованих гайок M3
- 2 шт. гвинтів M3 x 20
- 1 шт. гвинта M3 x 10 з пазом
- 9 шт. самозаблокованих гайок M4
- 1 шт. гвинта M4 x 40
- 1 шт. гвинта M4 x 30
- 5 шт. гвинтів M4 x 20
- 1 шт. різьбової палки M4 x 60 мм
- 1 шт. різьбової палки M4 x 32 мм
- 25 шт. кульок діаметром 6 мм
- 1 шт. підшипника 606zz
- Декілька шайб M4
Програмне забезпечення / Прошивка:
Існує кілька способів керування маніпулятором в залежності від бажаних результатів. Вибір методу залежить від того, чи хочете ви вільно його пересувати або змусити виконувати цикл. Я знайшов простий спосіб використання плати Pololu Mini Maestro, яка не вимагає написання жодного коду.
Я також створив інструкцію на Instructables: Android APP для керування 3D-друкованим роботом, де ви можете знайти приклади коду.
Успіхів у роботобудуванні!
-
EBAmk2_010_gearservo_22DENTI.STLСкачати
-
EBAmk2_019_drive_cover.STLСкачати
-
EBAmk2_011_gearmast.STLСкачати
-
EBAmk2_013_lower_base.STLСкачати
-
EBAmk2_003_varm.STLСкачати
-
EBAmk2_014_claw_base.STLСкачати
-
EBAmk2_010_gearservo.STLСкачати
-
EBAmk2_017_claw_finger_sx.STLСкачати
-
EBAmk2_015_claw_finger_dx.STLСкачати
-
EBAmk2_016_claw_gear_drive.STLСкачати
-
EBAmk2_009_trialinkfront.STLСкачати
-
EBAmk2_018_claw_gear_driven.STLСкачати
-
EBAmk2_012_mainbase.STLСкачати
-
EBAmk2_006_horarm__.STLСкачати
-
EBAmk2_006_horarm_plate.STLСкачати
-
EBAmk2_007_trialink.STLСкачати
-
EBAmk2_002_mainarm.STLСкачати
-
EBAmk2_001_base.STLСкачати
-
EBAmk2_005_link135angled.STLСкачати
-
EBAmk2_008_link147_new.STLСкачати
-
EBAmk2_004_link135.STLСкачати
-
EBAmk2_011_gearmast_full.STLСкачати
-
EBAmk2_014_claw_std.stepСкачати
-
EBAmk2_014_claw_std.dwgСкачати
-
EBAmk2_014_claw_std.pdfСкачати
Для додавання коментарів необхідно увійти.
Інформація
- Автор: admin
- Дата: 05.12.2025
- Категорія: Хобі та Радіокеровані моделі
- Переглядів: 62
- Завантажень: 238
- Вподобайок: 0
- Зображень: 22
- Файлів: 25
Скачати ZIP