Открытый источник: Роботизированная рука
admin | 10.12.2025
Галерея (6)
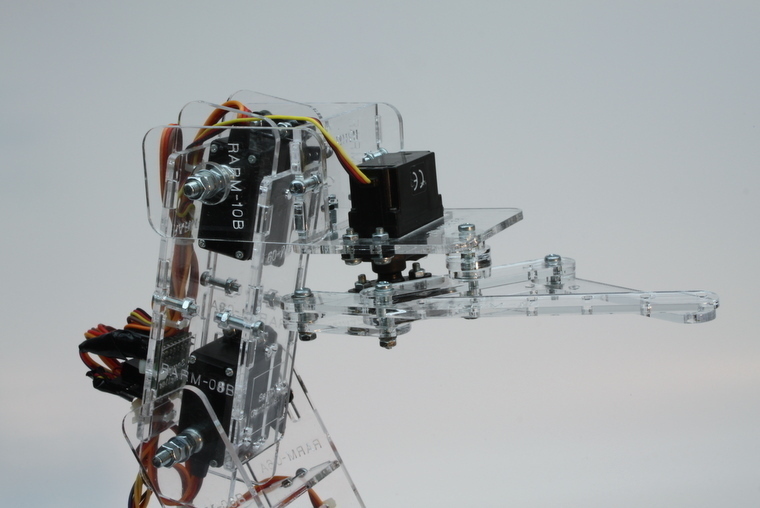
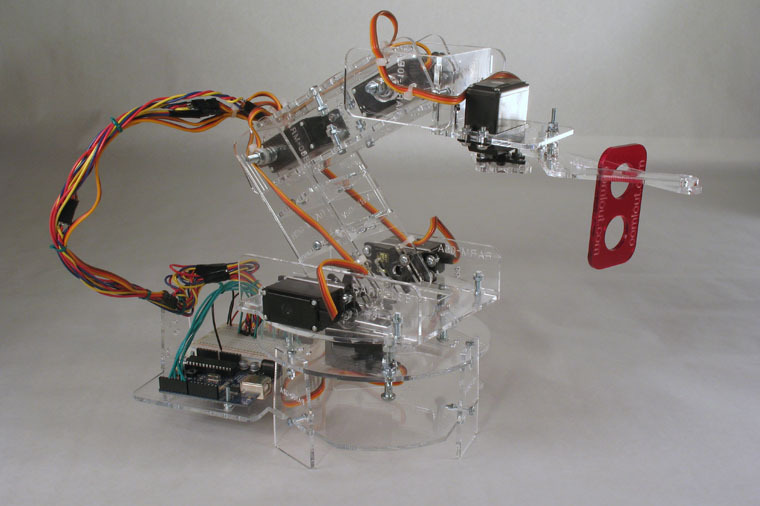


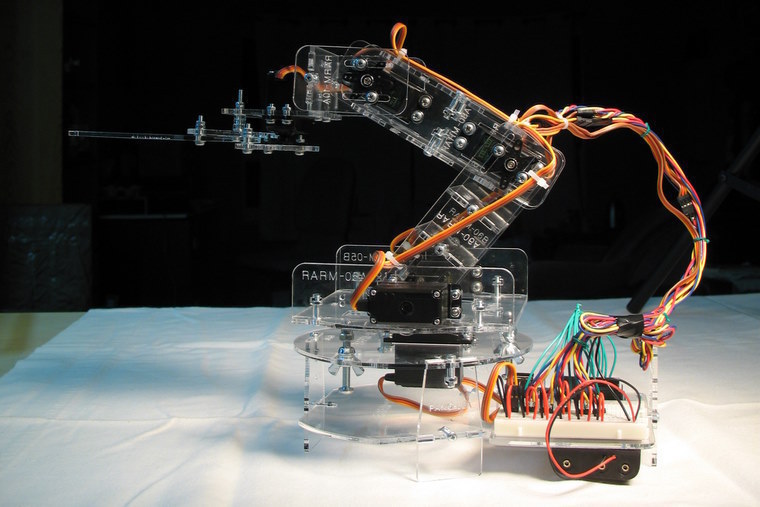
Описание модели: Это роботизированная рука с пятью степенями свободы, созданная на основе открытого исходного кода. Она предназначена для реализации различных проектов и экспериментов в области робототехники.
Применение: Модель идеально подходит для учебных целей и для тех, кто хочет изучить основы робототехники и программирования.
Особенности конструкции: Роботизированная рука требует использования шести стандартных сервомоторов и полуловного контроллера. Обратите внимание, что для правильной работы необходимо учитывать ограничения на сервомоторах, чтобы избежать их повреждения.
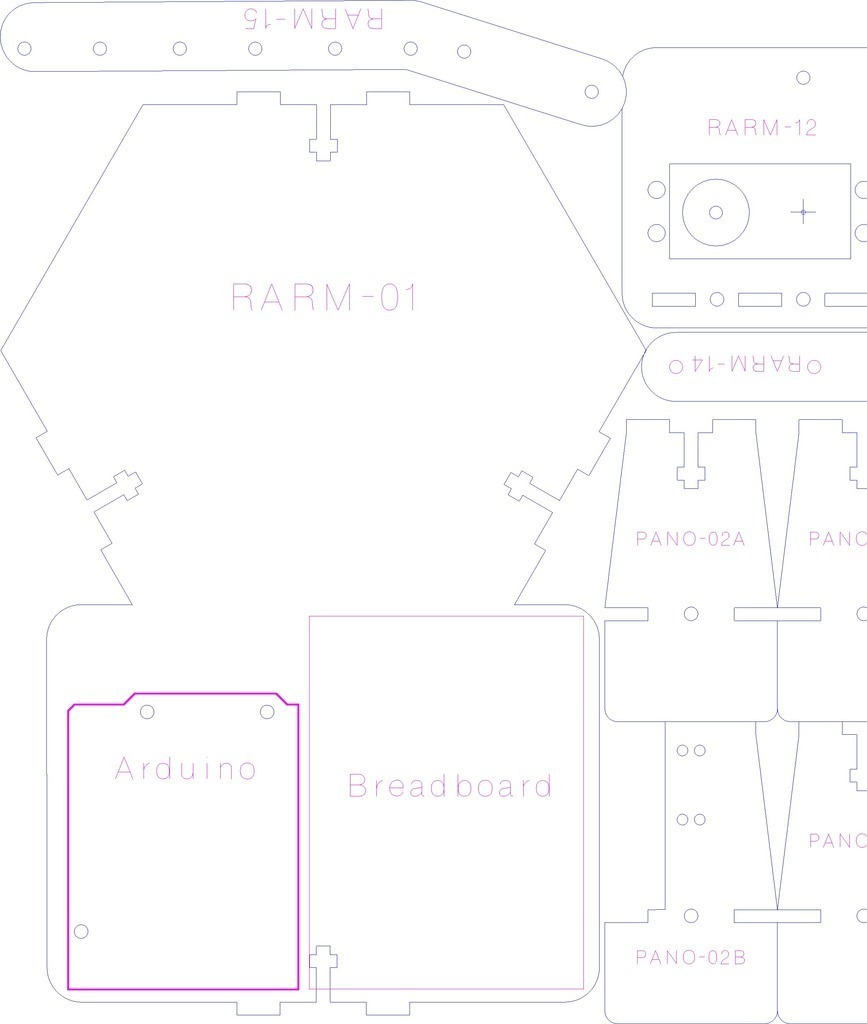
Рекомендации по печати: Используйте 3 мм листовой материал для изготовления деталей. Для сборки необходимы крепежные элементы: винты 3 мм x 10 мм, 3 мм x 15 мм, 3 мм x 30 мм, шайбы, гайки и блокирующие гайки. Рекомендуется использовать более точные сервомоторы для улучшения работы устройства.
Для добавления комментариев необходимо войти.
Информация
- Автор: admin
- Дата: 10.12.2025
- Категория: Хобби и Радиоуправление
- Просмотров: 100
- Загрузок: 69
- Лайков: 0
- Изображений: 6
- Файлов: 3
Скачать ZIP