Платформа для разработки самобалансирующегося робота
admin | 10.12.2025
3D Предпросмотр
Загрузка 3D модели...
Галерея (34)


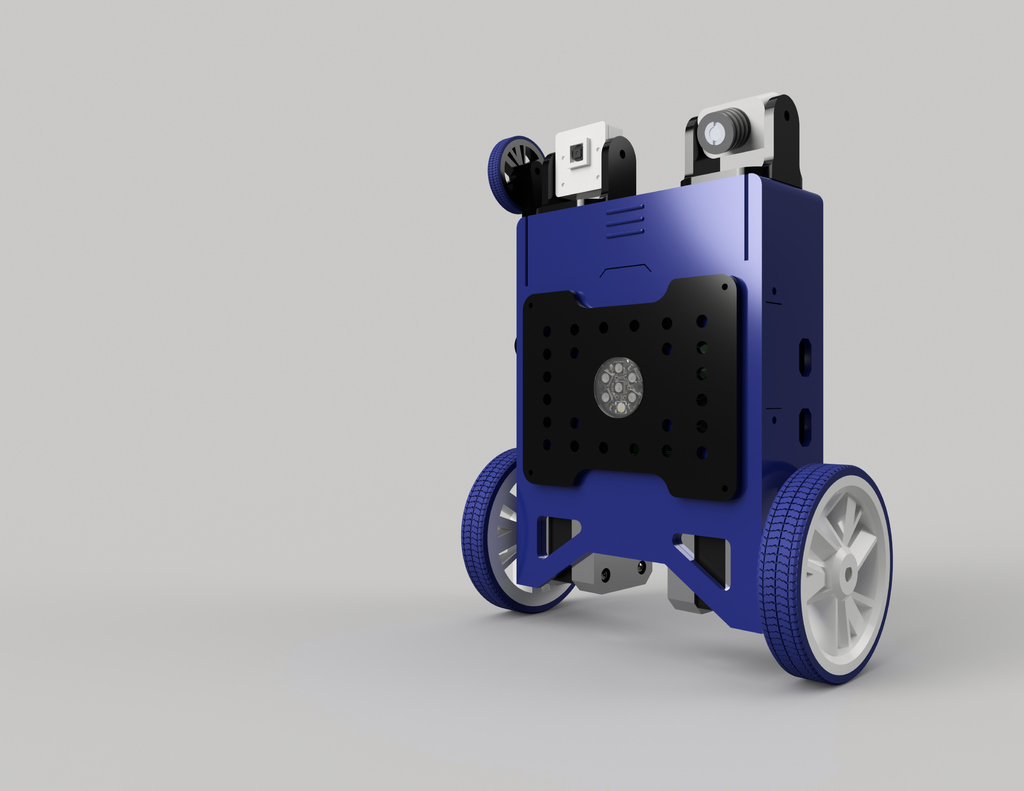

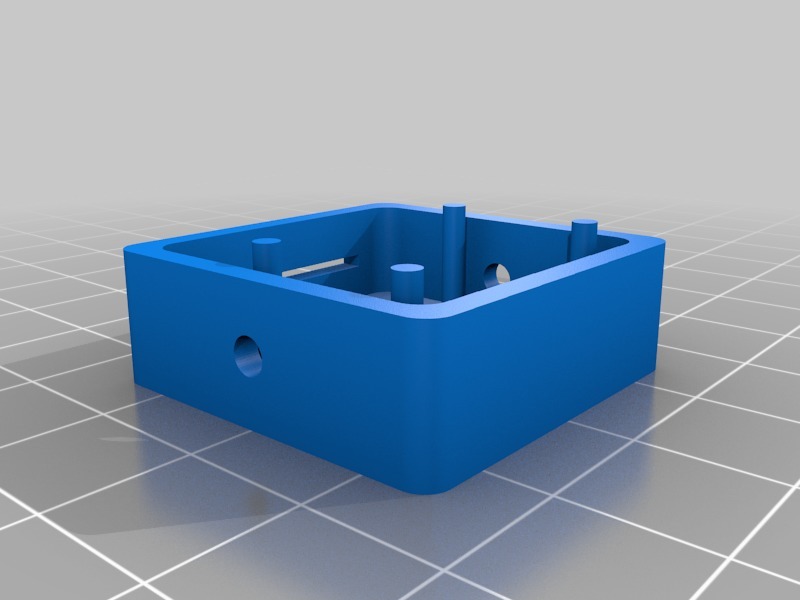

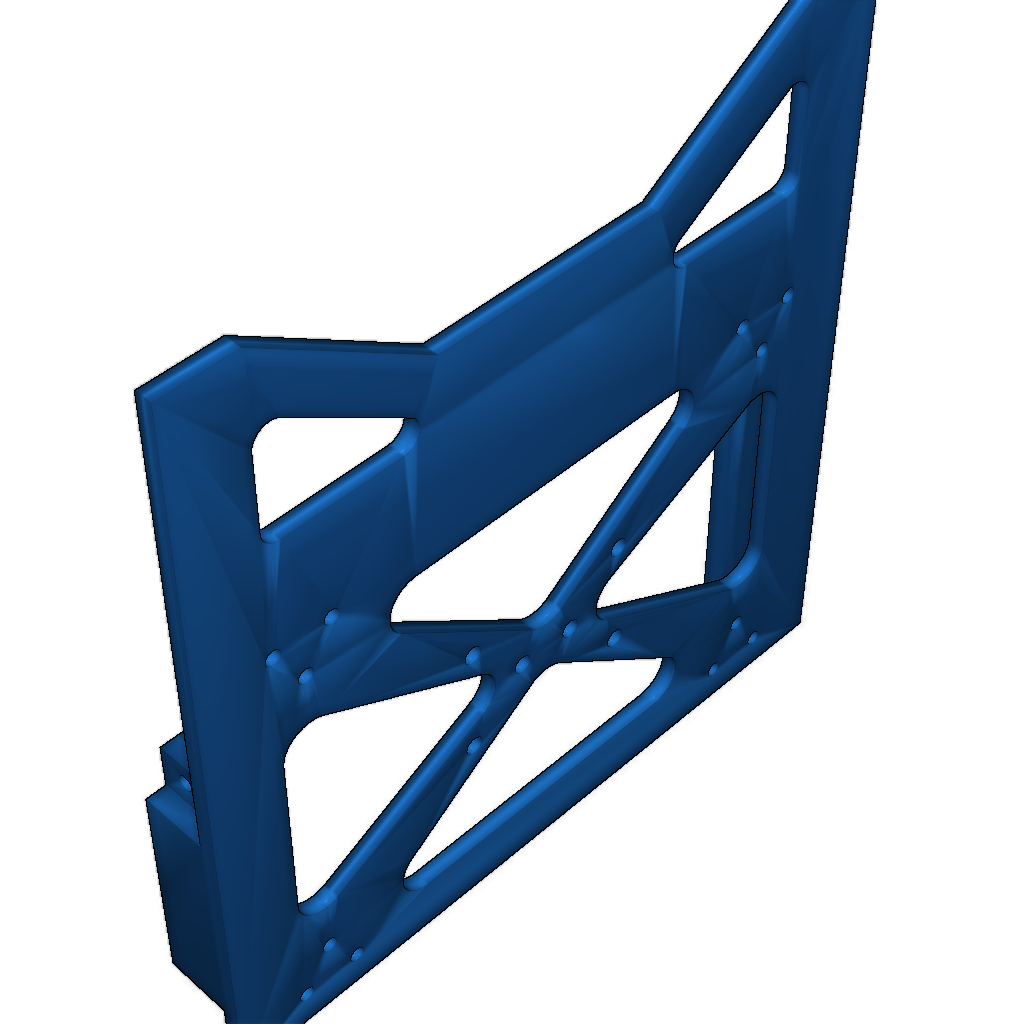
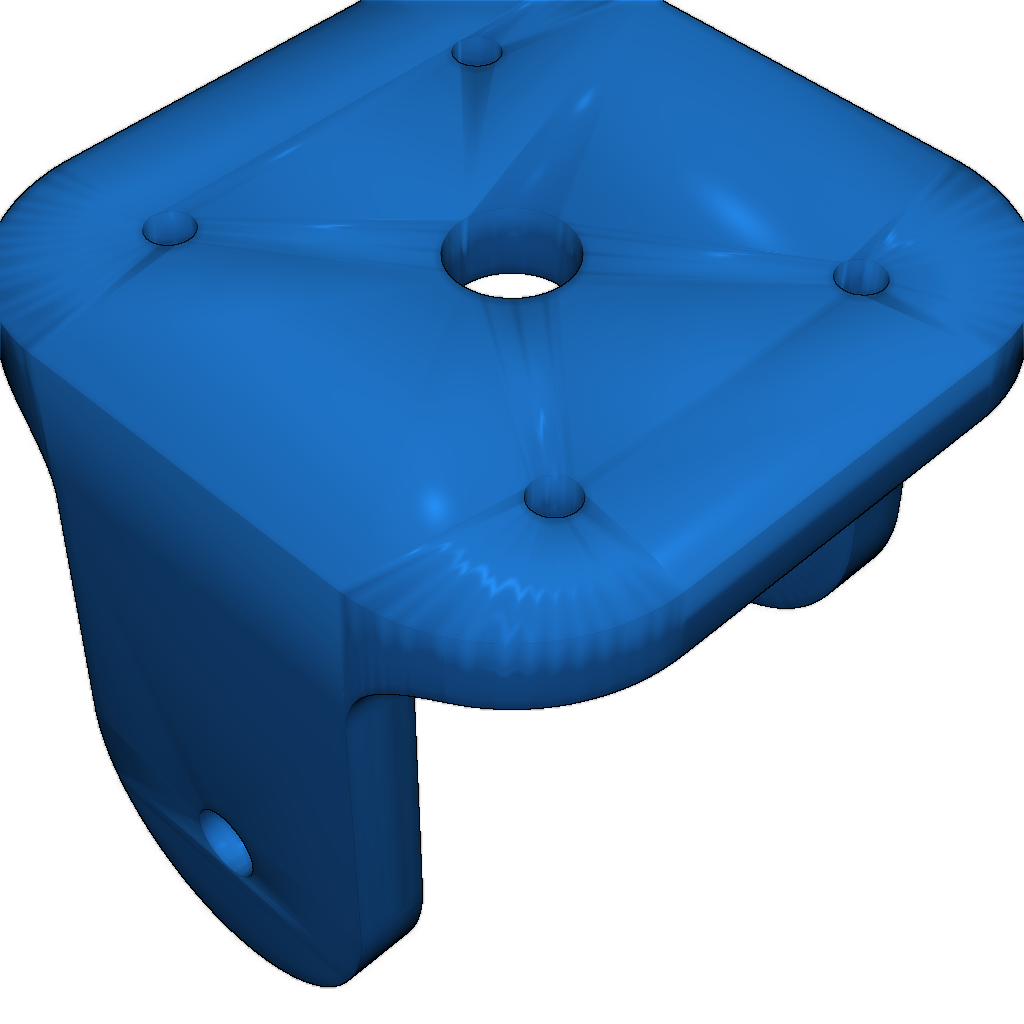

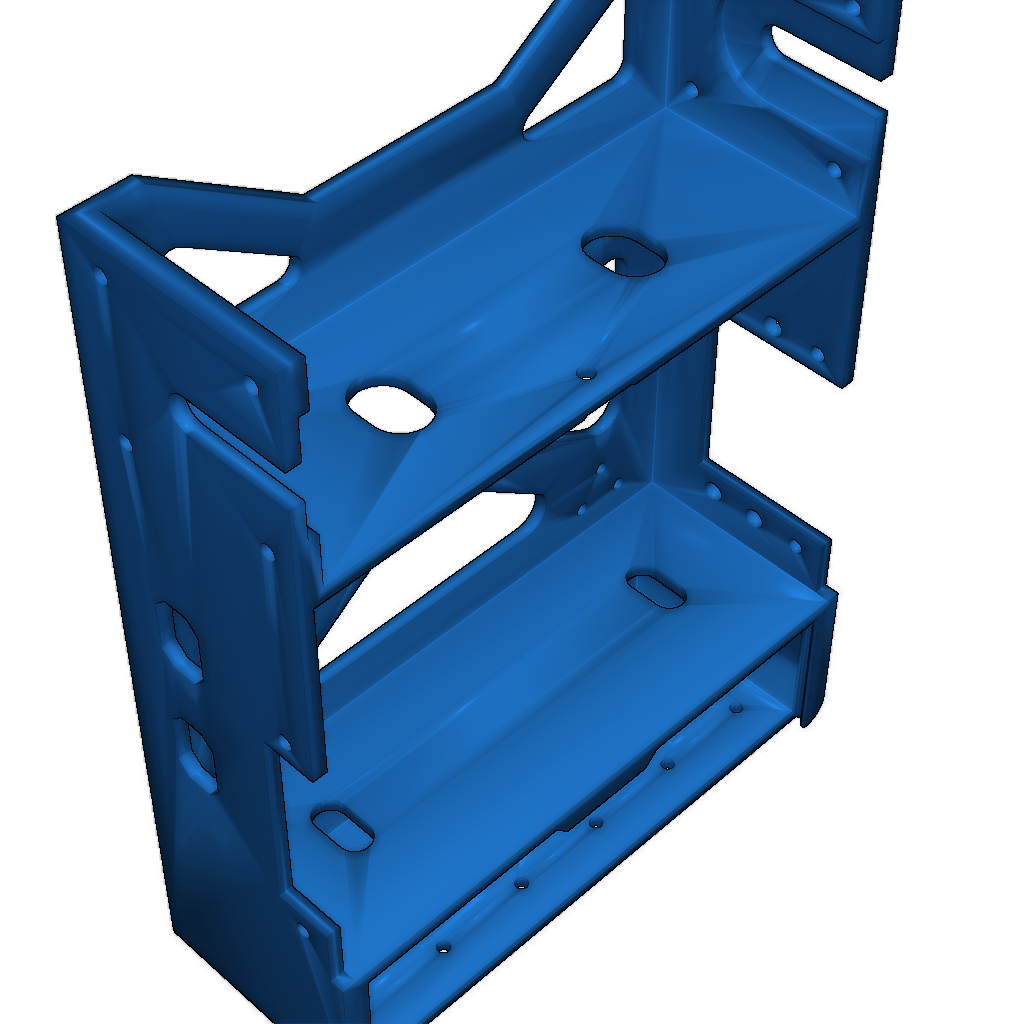
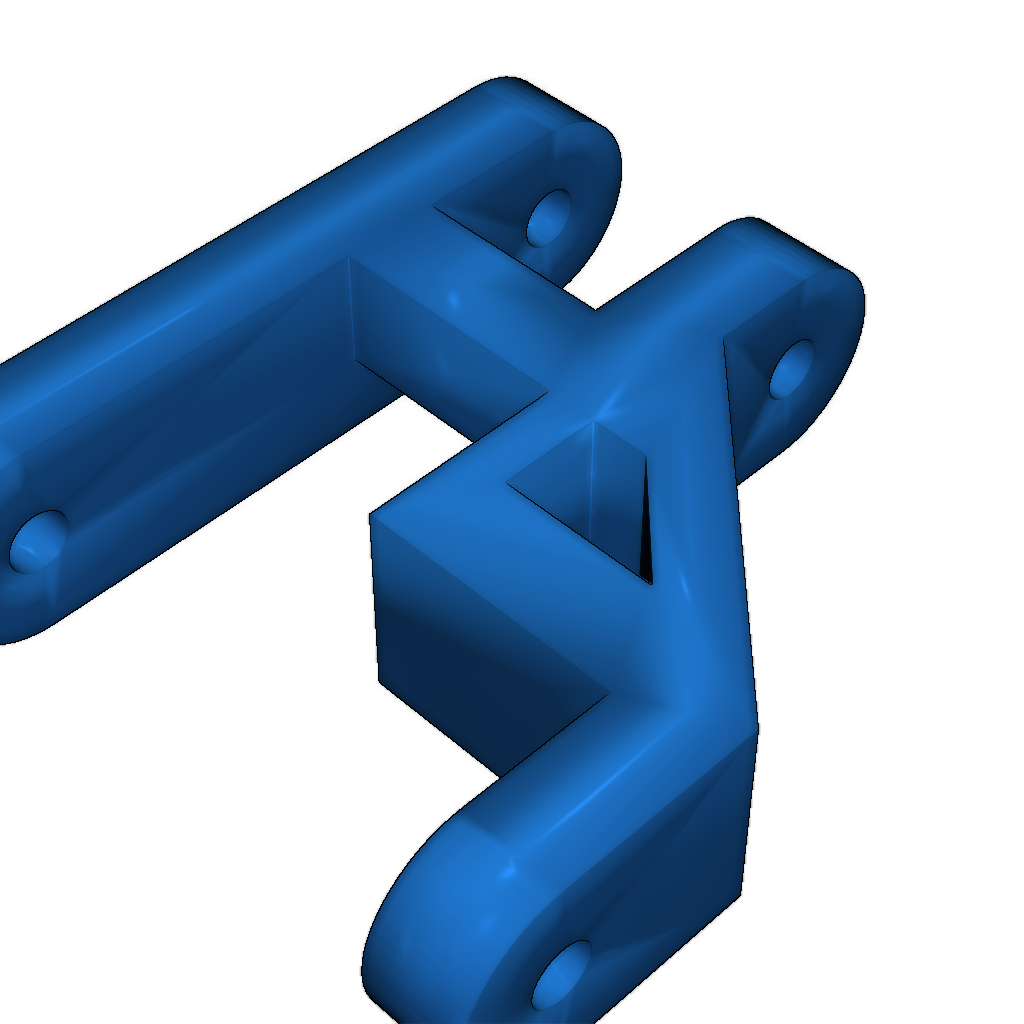
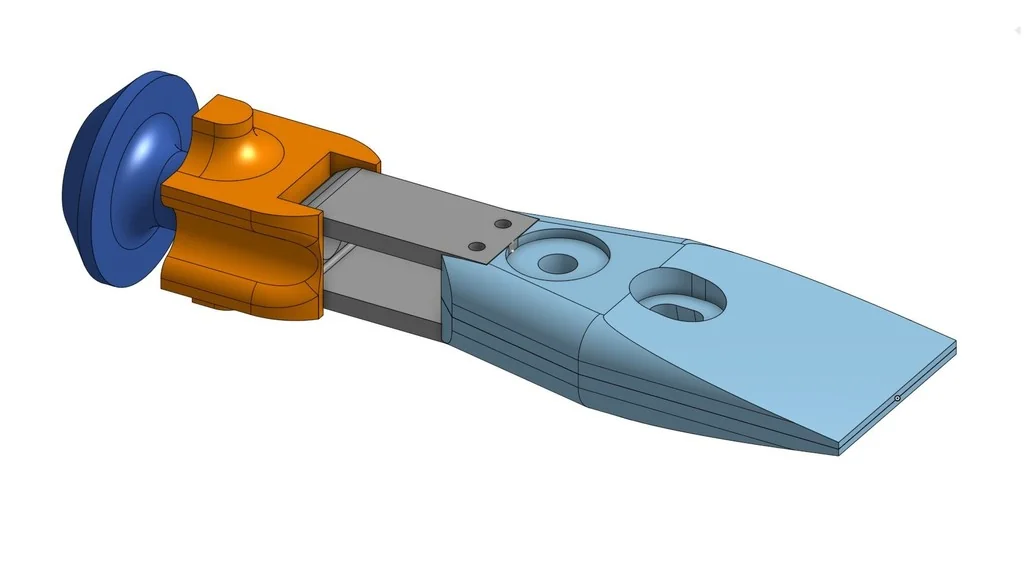
Данная 3D-модель представляет собой платформу для разработки самобалансирующегося робота, созданную с учетом модульности, что позволяет настраивать её для различных целей.
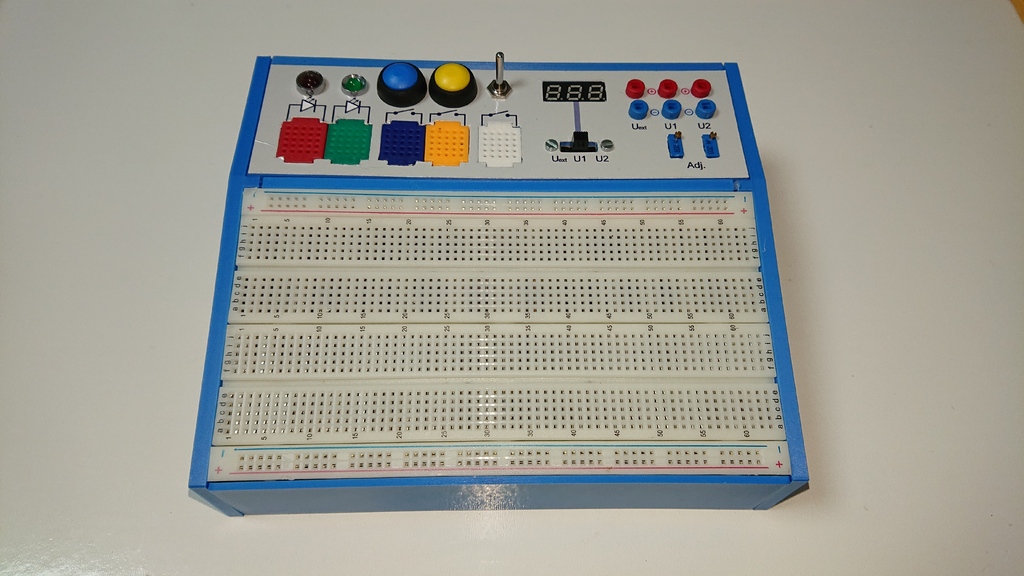
Применение: Платформа предназначена для создания роботов, включая телеприсутствие, и может использоваться в различных проектах с добавлением электроники и датчиков.
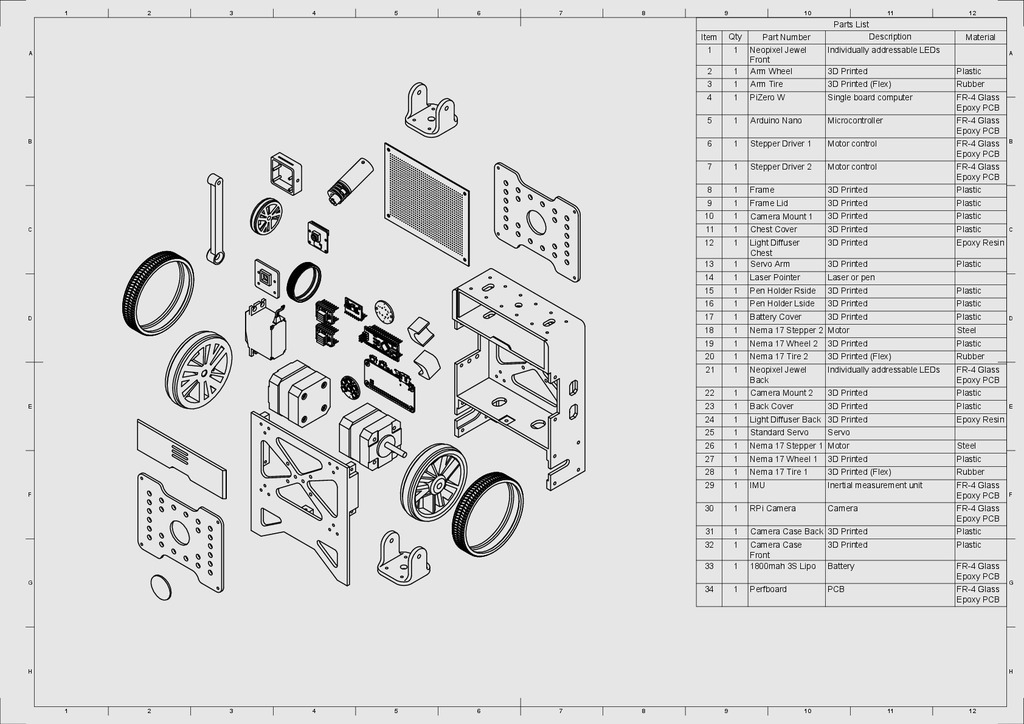
Особенности конструкции:
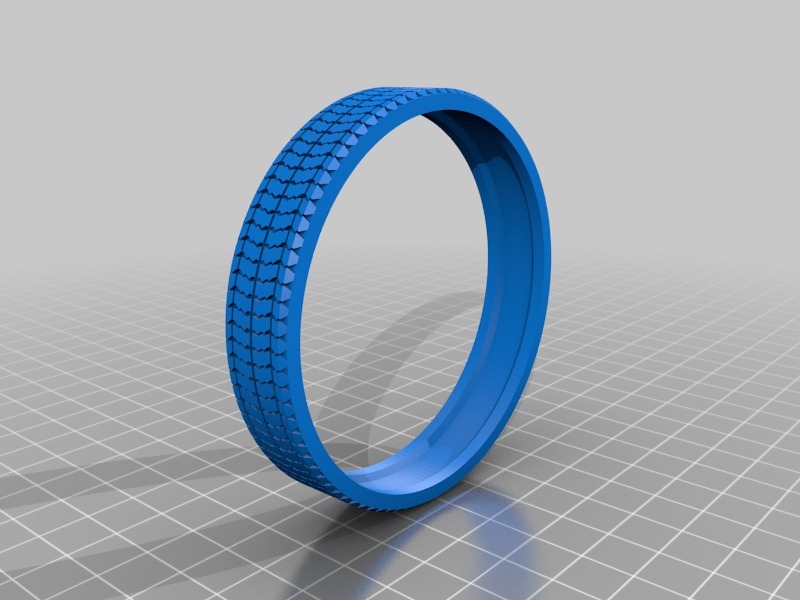
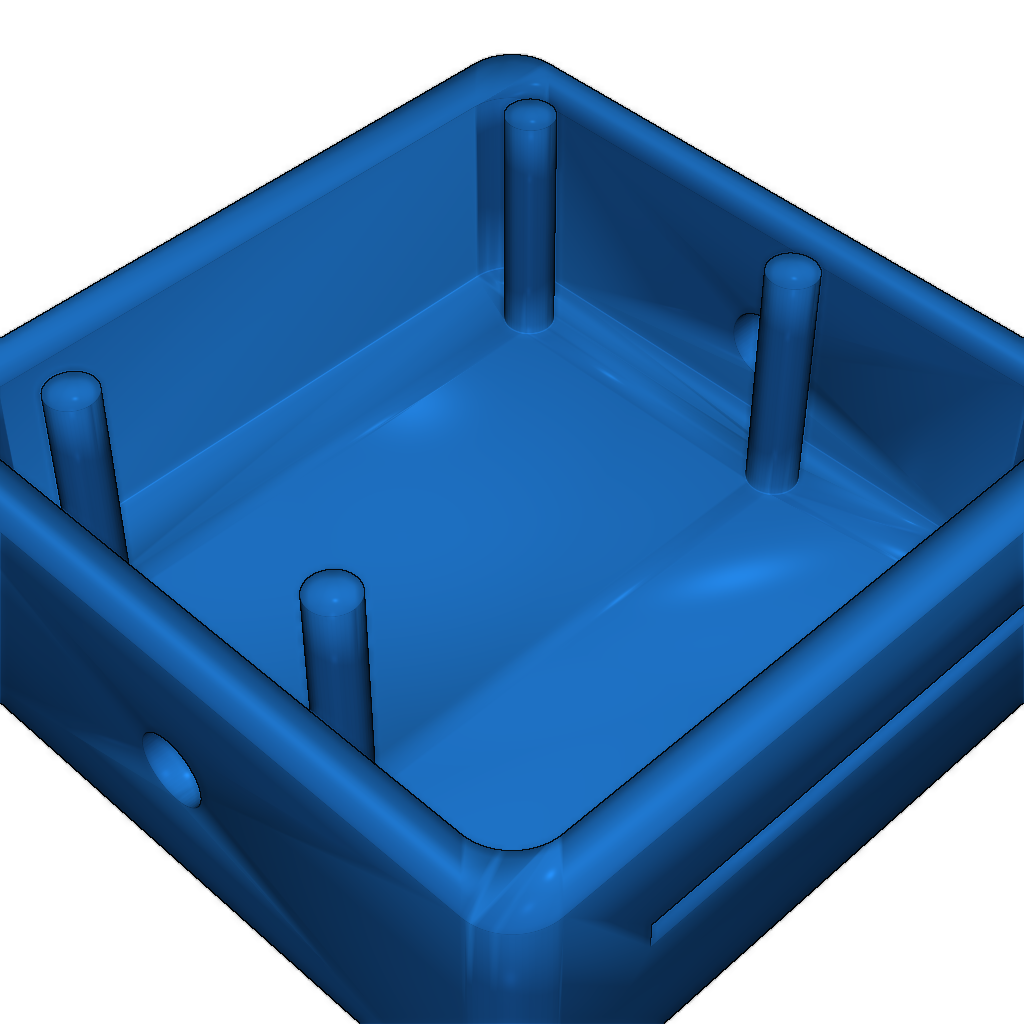
- Все детали выполнены с учетом стандартных допусков для PLA, кроме шин, которые следует печатать из TPU или другого гибкого материала.
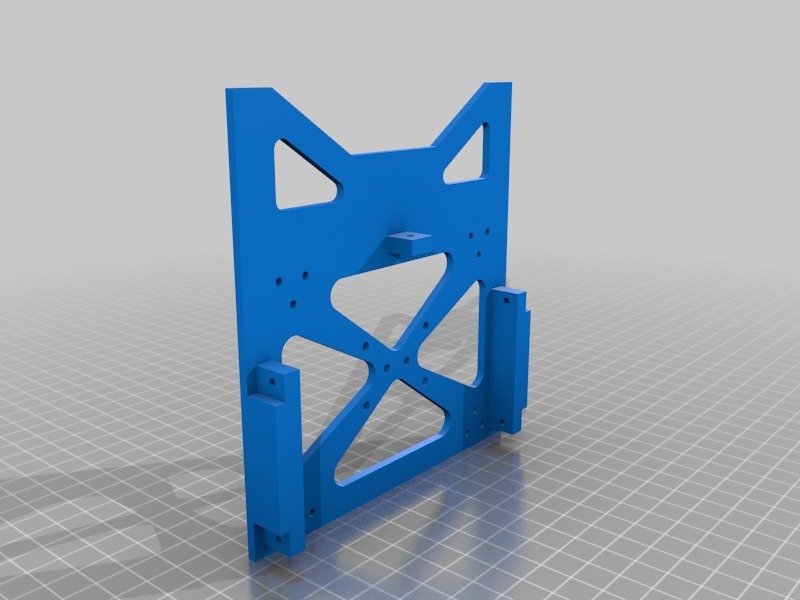
- Большинство отверстий имеют диаметр 2.5 мм для болтов M3.
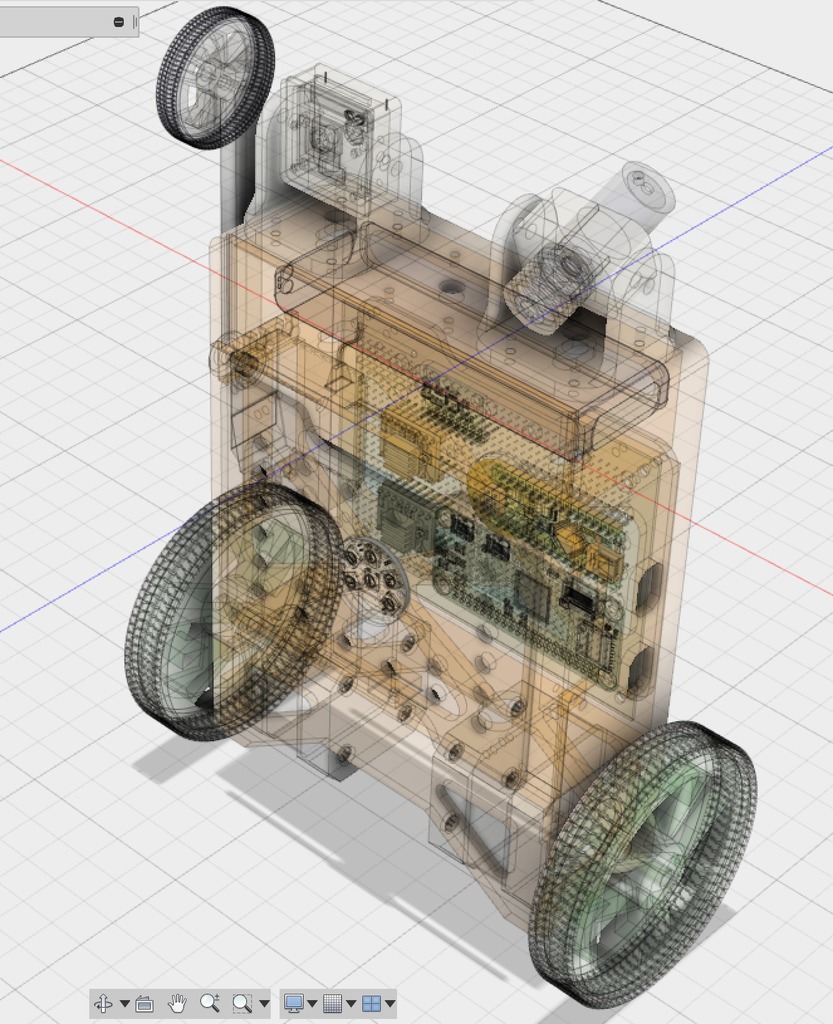
- Достаточно места для установки Raspberry Pi Zero W, Arduino Nano, шаговых двигателей, сервоприводов, малой камеры и других компонентов.
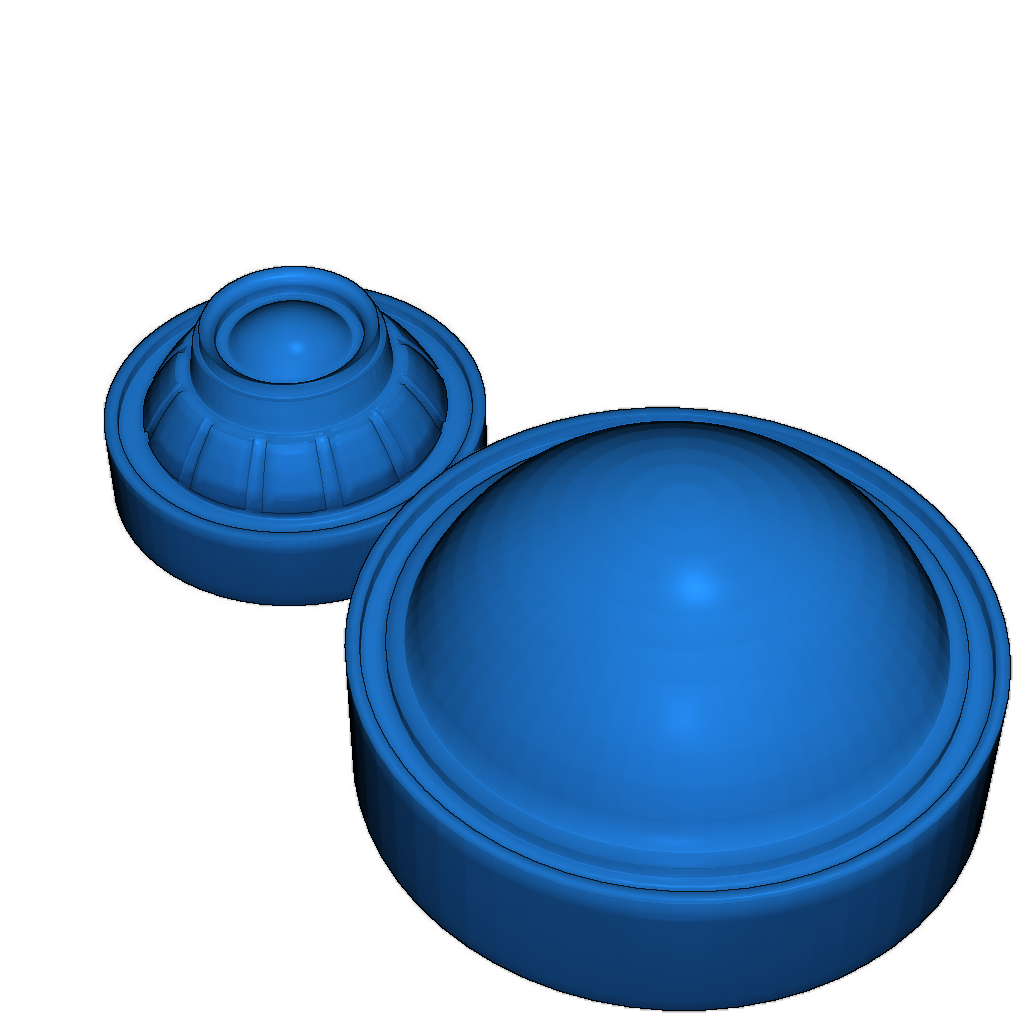
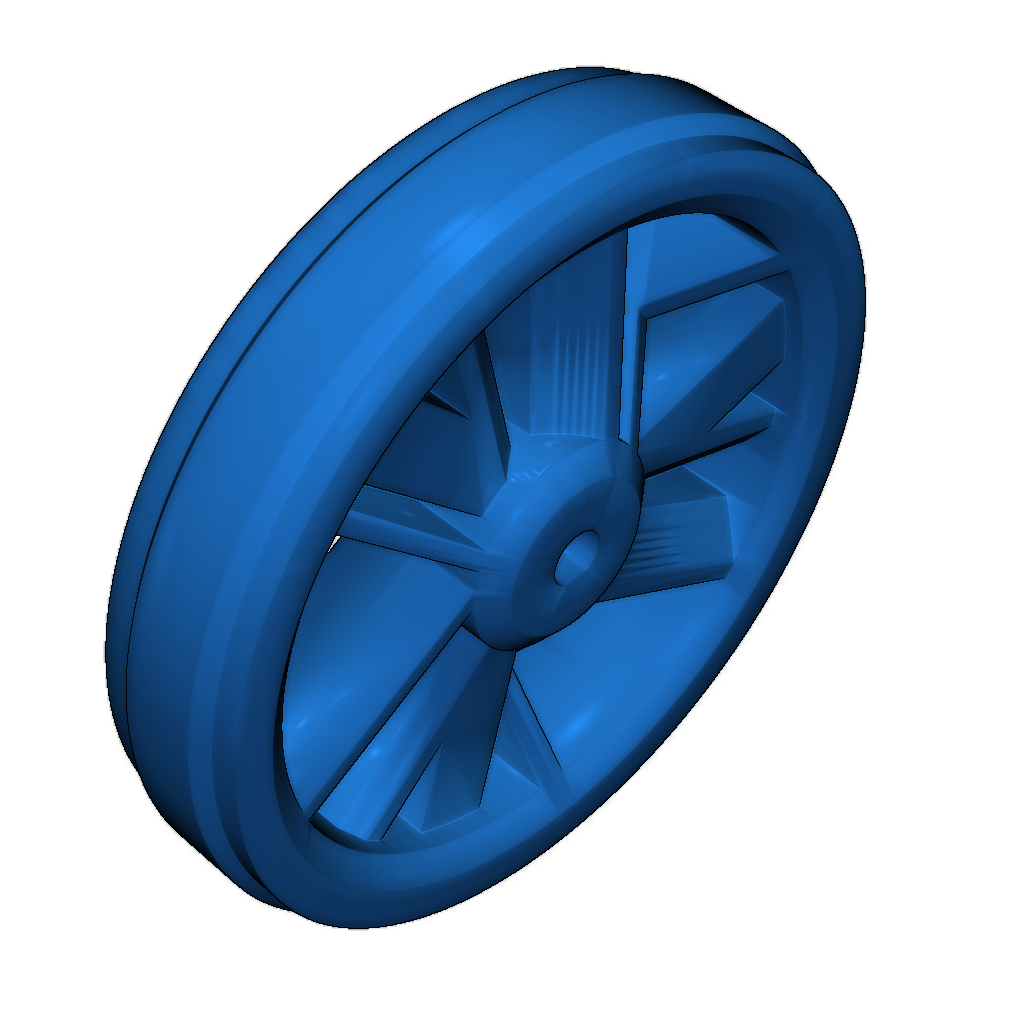
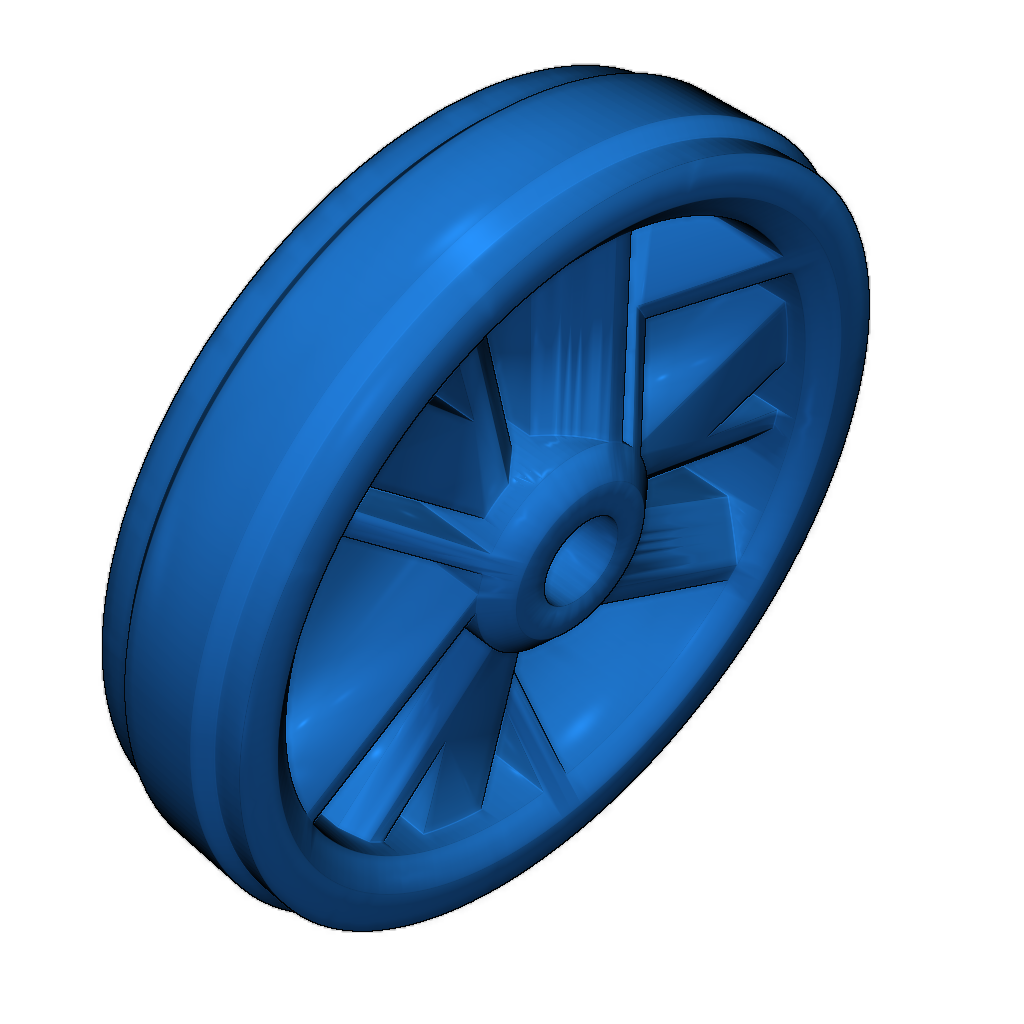
Рекомендации по печати: Для печати колес и шин рекомендовано использовать PLA, обеспечивая плотное посадочное соединение, чтобы колеса можно было установить на ось без использования инструментов или клея.
-
Self_Balancing_Robot_Assembly_Drawing_v2.pdfСкачать
-
Servo_Arm.stlСкачать
-
Frame_Lid.stlСкачать
-
Camera_Mount.stlСкачать
-
Battery_Cover.stlСкачать
-
Camera_Case_Back.stlСкачать
-
Pen_Holder_PRINT_TWICE.stlСкачать
-
Nema_17_Wheel_PRINT_TWICE.stlСкачать
-
Nema_17_Tire_PRINT_TWICE.stlСкачать
-
Light_Diffuser_PRINT_TWICE.stlСкачать
-
Arm_Tire.stlСкачать
-
Chest_and_Back_Cover_PRINT_TWICE.stlСкачать
-
Camera_Case_Front.stlСкачать
-
Arm_Wheel.stlСкачать
-
Frame.stlСкачать
-
Self_Balancing_Robot_Development_Platform_Version_1.1_by_Flux_Axiom.f3dСкачать
Для добавления комментариев необходимо войти.
Информация
- Автор: admin
- Дата: 10.12.2025
- Категория: Хобби и Радиоуправление
- Просмотров: 130
- Загрузок: 354
- Лайков: 0
- Изображений: 34
- Файлов: 16
Скачать ZIP