Quadruped Robot with Computer Vision Control
admin | 04.12.2025
3D Preview
Loading 3D model...
Gallery (46)
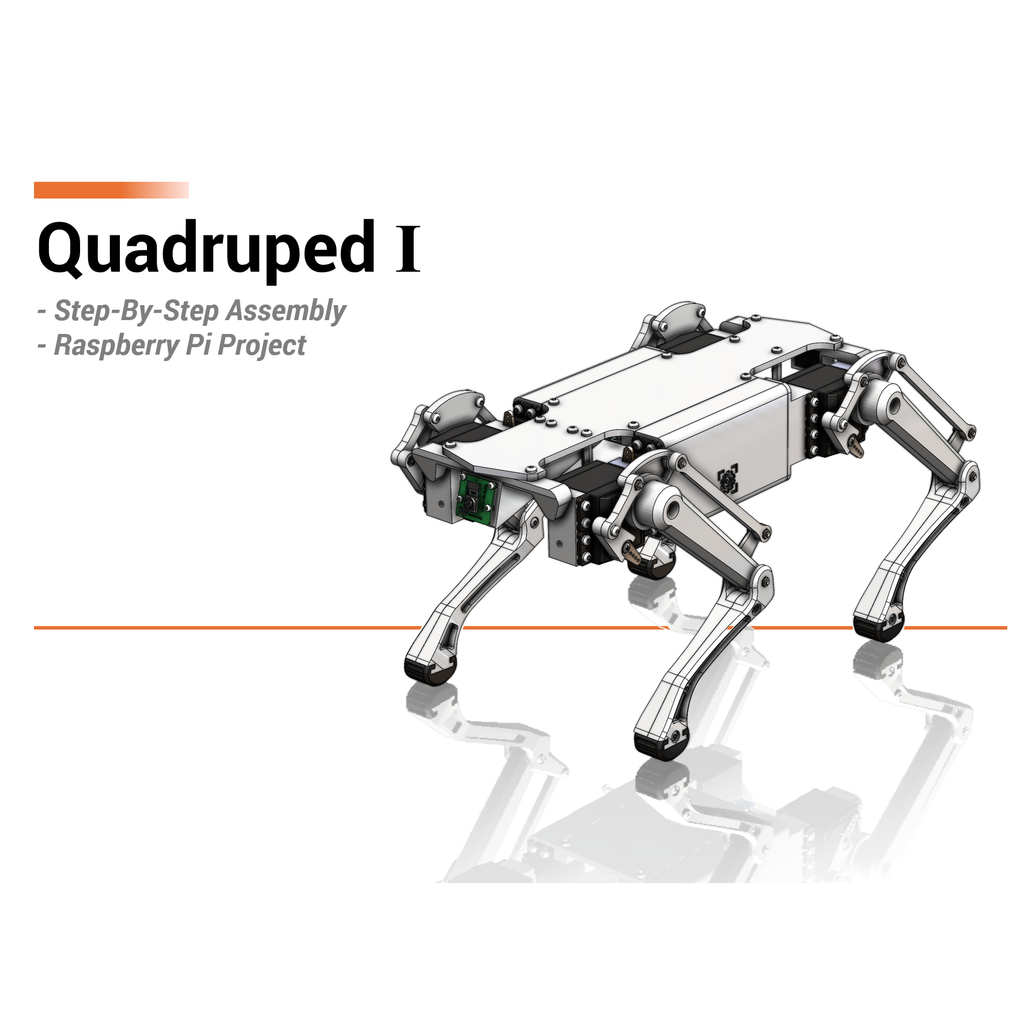
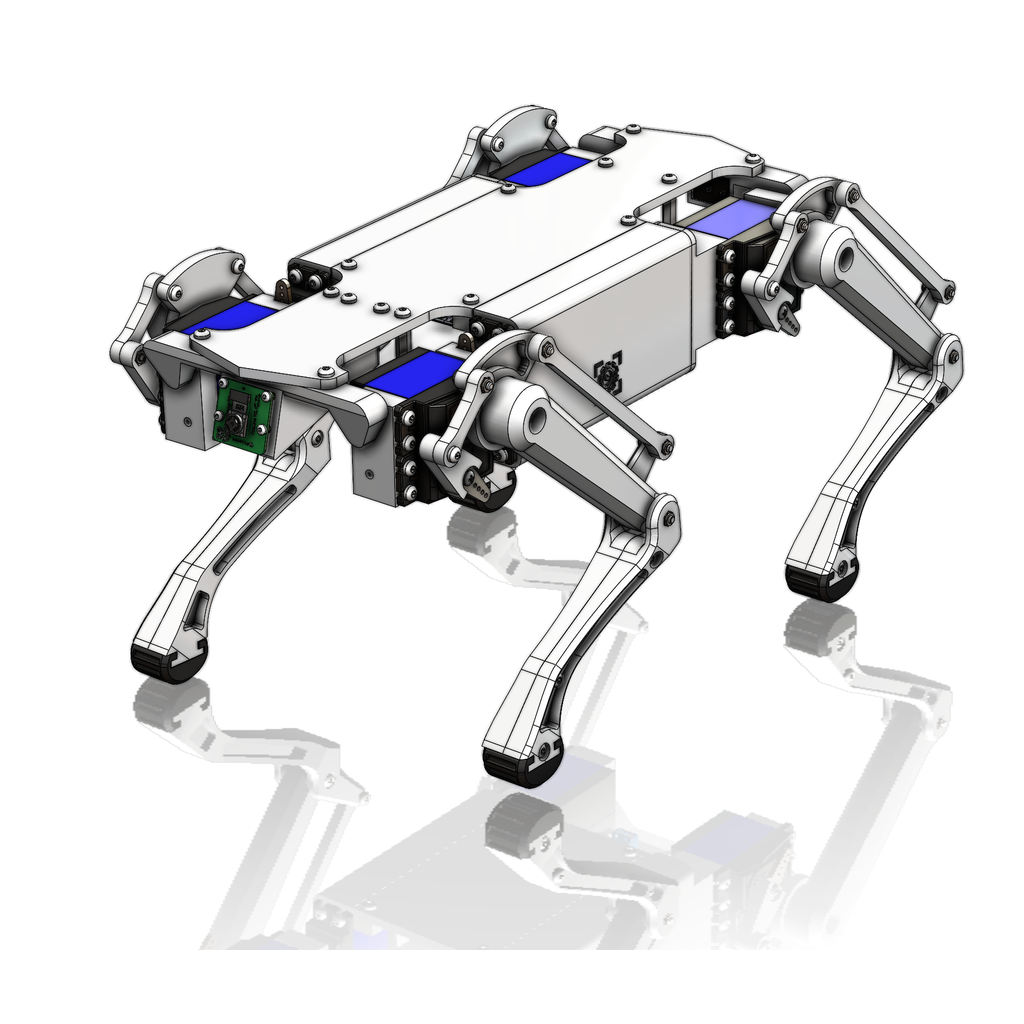



A quadruped robot capable of computer-vision-based tracking and following. The model is based on an existing open-source project (DIY quadruped robot).
Print Instructions:
- Use organic supports where necessary.
- 15% infill.
- Use PETG, ASA, ABS or any other stiffer material.
- The feet can be printed in any material, but softer materials like TPU are preferred.
Necessary/Good to Have Tools:
- Wire cutters
- Wire strippers
- Precision screwdriver set
- Soldering iron
Installation Instructions:
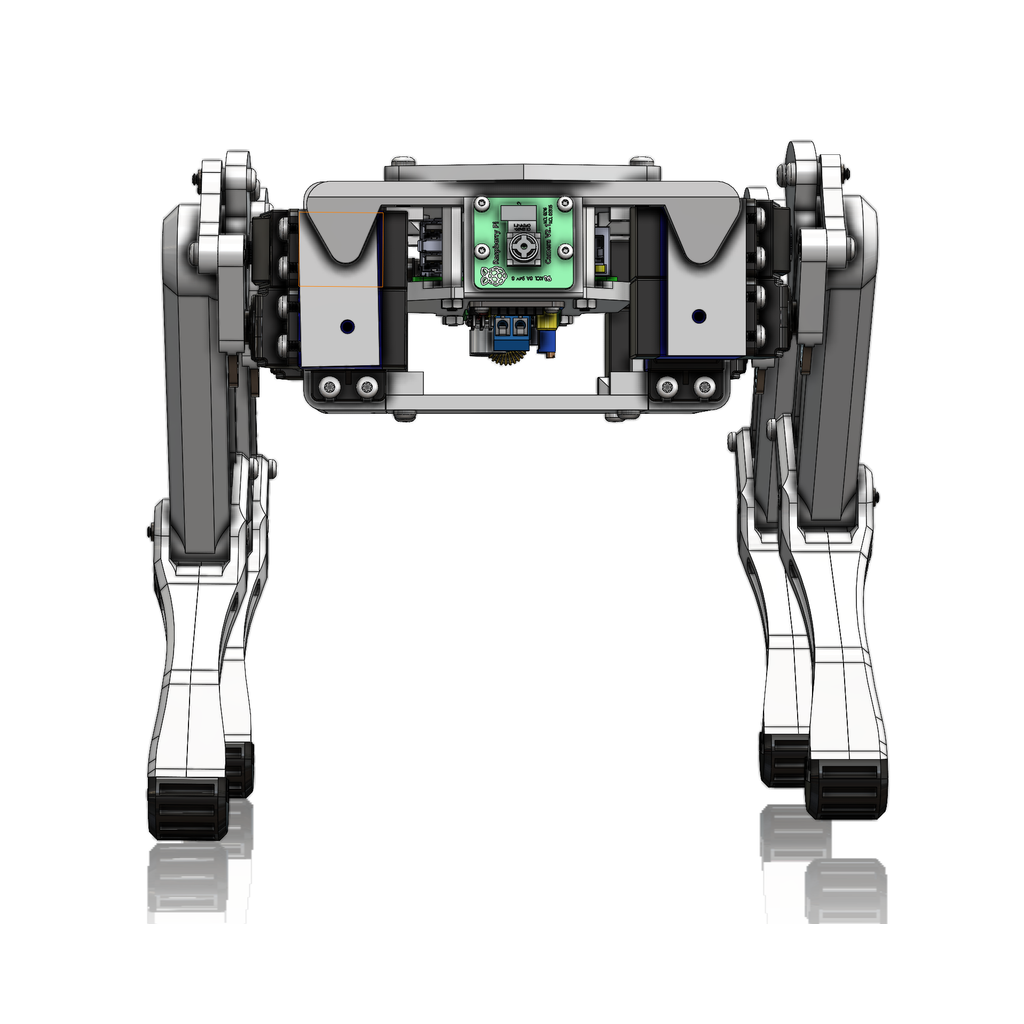
To use this code, simply download the repository onto the Raspberry Pi, install the requirements, set up the Pi for camera and servo library usage, and run python3 control-quadruped. This will start the walking motion and print out the Pi's IP and port.
Connect the motors to the Raspberry Pi and run the calibrate command to center all motors. Continue building by installing the motors and attaching the limbs. For electrical setup, just connect everything to PWM.
Computer Vision Controller: the computer vision controller has a few extra steps that can be followed in the instructions.
-
quadruped-robot-main.zipDownload
-
0102_Top_Cover.STLDownload
-
0103_RearServo_Bracket.STLDownload
-
0104_FrontServo_Bracket.STLDownload
-
0105_LeftHipServo_Bracket.STLDownload
-
0106_RightHipServo_Bracket.STLDownload
-
0107_Camera_Bracket.STLDownload
-
0108_Belly.STLDownload
-
0109_Tail.STLDownload
-
0201_Femur.STLDownload
-
0202_Foot.STLDownload
-
0203_Link_100mm.STLDownload
-
0204_Link_28mm.STLDownload
-
0205_MotorExtension.STLDownload
-
0206_InnerRight_Tibia.STLDownload
-
0207_OuterRight_Tibia.STLDownload
-
0208_Right_Shoulder.STLDownload
-
0301_InnerLeft_Tibia.STLDownload
-
0302_OuterLeft_Tibia.STLDownload
-
0303_Left_Shoulder.STLDownload
-
0401_BellyBracket.STLDownload
-
0101_Side_Cover.STLDownload
-
1000_Quadruped_v0.6_Assembly_Guide.pdfDownload
-
1000_Quadruped_BOM_v0.6.pdfDownload
Please login to post comments.
Information
- Author: admin
- Date: 04.12.2025
- Category: Hobby & RC
- Views: 73
- Downloads: 263
- Likes: 0
- Images: 46
- Files: 24
Download ZIP