Четвероногий робот з управлінням на основі комп'ютерного зору
admin | 04.12.2025
3D Попередній перегляд
Завантаження 3D моделі...
Галерея (46)
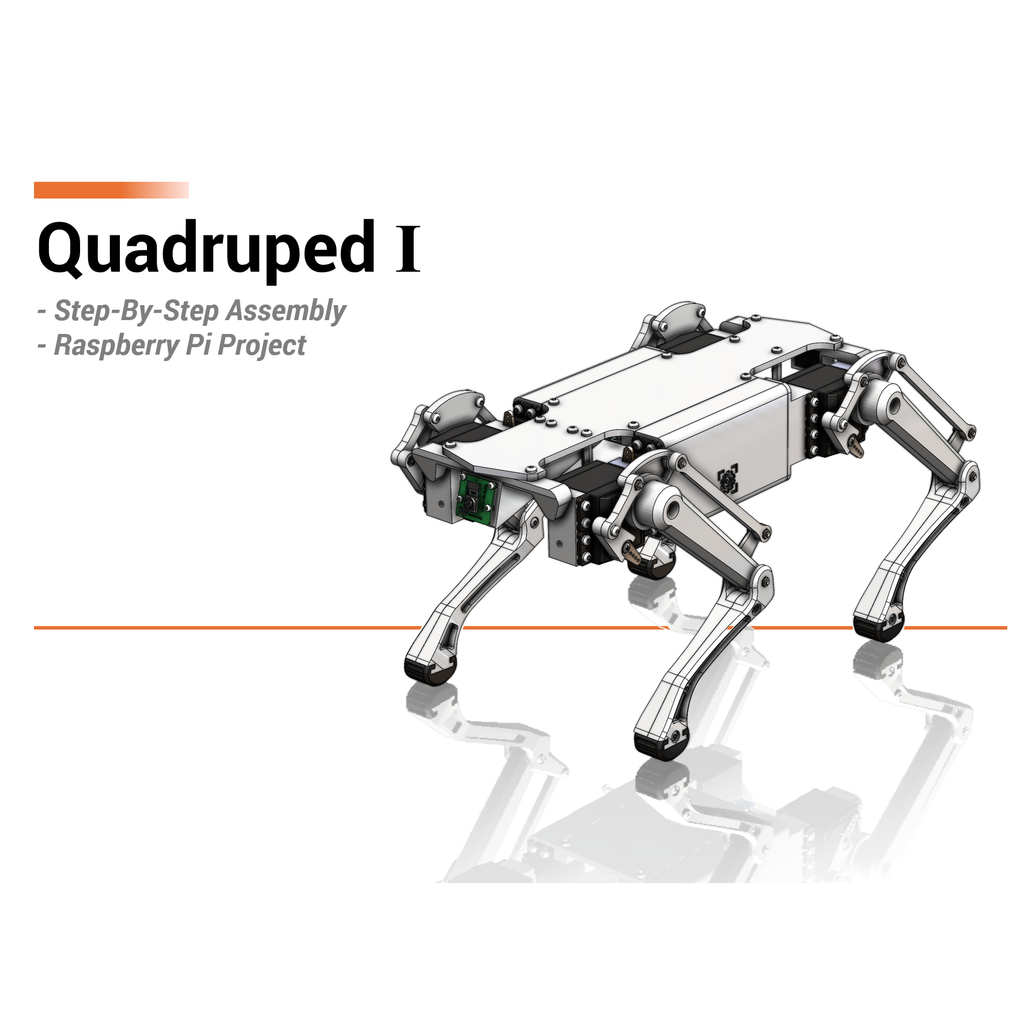
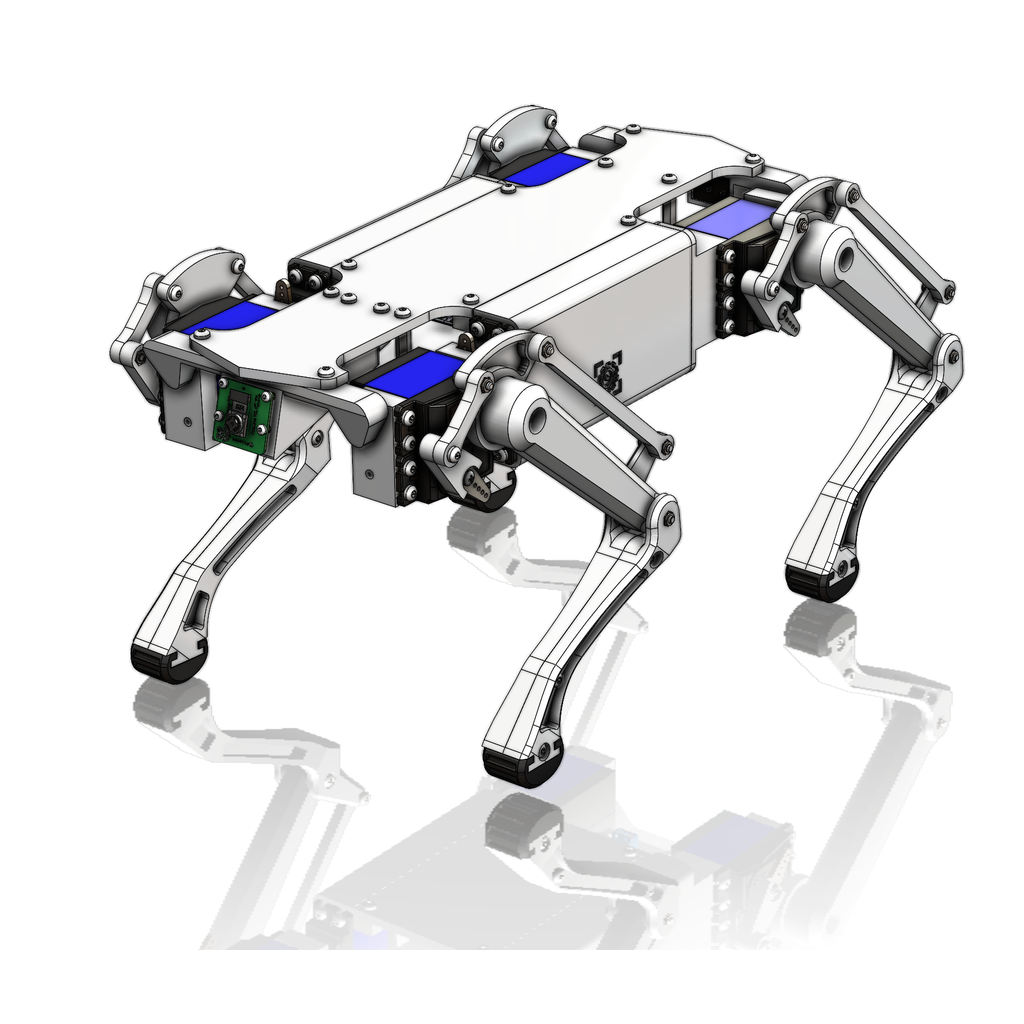

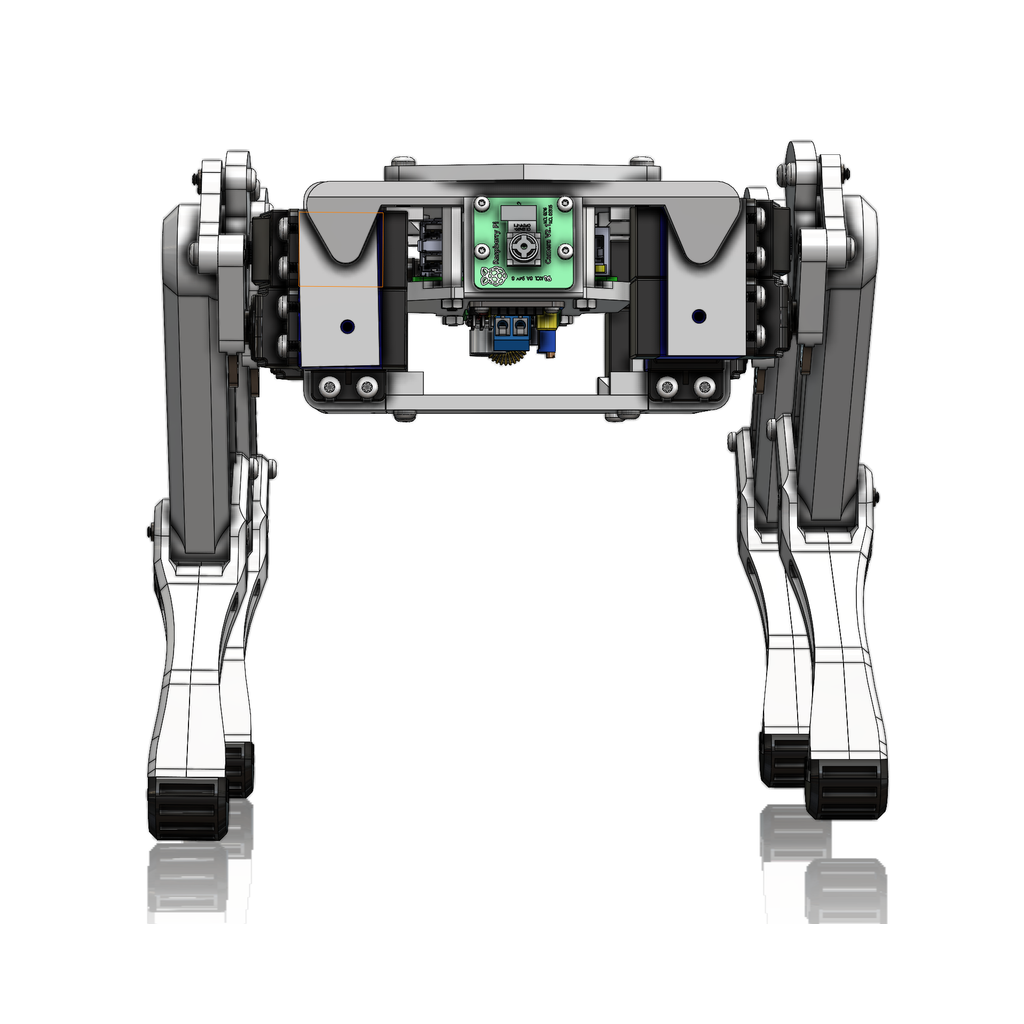


Четвероногий робот, що здатний до відстеження та слідування на основі комп'ютерного зору. Модель базується на існуючому відкритому проекті (DIY четвероногий робот).
Інструкції для друку:
- Використовуйте органічні підтримки, де це необхідно.
- 15% заповнення.
- Використовуйте PETG, ASA, ABS або будь-який інший більш жорсткий матеріал.
- Ноги можуть бути надруковані з будь-якого матеріалу, але для них переважно використовувати більш м'які матеріали, такі як TPU.
Необхідні/Корисні інструменти:
- Кусачки для проводів
- Съемники ізоляції
- Набір прецизійних викруток
- Паяльник
Інструкції з встановлення:
Щоб використовувати цей код, просто завантажте репозиторій на Raspberry Pi, встановіть вимоги, налаштуйте Pi для використання камери та бібліотеки сервоприводів і виконайте python3 control-quadruped. Це запустить рух і виведе IP-адресу та порт Pi.
Підключіть мотори до Raspberry Pi і виконайте команду калібрування, щоб централізувати всі мотори. Продовжте складання, встановивши мотори на стегнах та прикріпивши кінцівки. Для електричних з'єднань просто підключіть усе до PWM.
Контролер комп'ютерного зору: контролер комп'ютерного зору має кілька додаткових етапів, які можна знайти в інструкції.
-
quadruped-robot-main.zipСкачати
-
0102_Top_Cover.STLСкачати
-
0103_RearServo_Bracket.STLСкачати
-
0104_FrontServo_Bracket.STLСкачати
-
0105_LeftHipServo_Bracket.STLСкачати
-
0106_RightHipServo_Bracket.STLСкачати
-
0107_Camera_Bracket.STLСкачати
-
0108_Belly.STLСкачати
-
0109_Tail.STLСкачати
-
0201_Femur.STLСкачати
-
0202_Foot.STLСкачати
-
0203_Link_100mm.STLСкачати
-
0204_Link_28mm.STLСкачати
-
0205_MotorExtension.STLСкачати
-
0206_InnerRight_Tibia.STLСкачати
-
0207_OuterRight_Tibia.STLСкачати
-
0208_Right_Shoulder.STLСкачати
-
0301_InnerLeft_Tibia.STLСкачати
-
0302_OuterLeft_Tibia.STLСкачати
-
0303_Left_Shoulder.STLСкачати
-
0401_BellyBracket.STLСкачати
-
0101_Side_Cover.STLСкачати
-
1000_Quadruped_v0.6_Assembly_Guide.pdfСкачати
-
1000_Quadruped_BOM_v0.6.pdfСкачати
Для додавання коментарів необхідно увійти.
Інформація
- Автор: admin
- Дата: 04.12.2025
- Категорія: Хобі та Радіокеровані моделі
- Переглядів: 72
- Завантажень: 261
- Вподобайок: 0
- Зображень: 46
- Файлів: 24
Скачати ZIP