Четвероногий робот с управлением по компьютерному зрению
admin | 04.12.2025
3D Предпросмотр
Загрузка 3D модели...
Галерея (46)
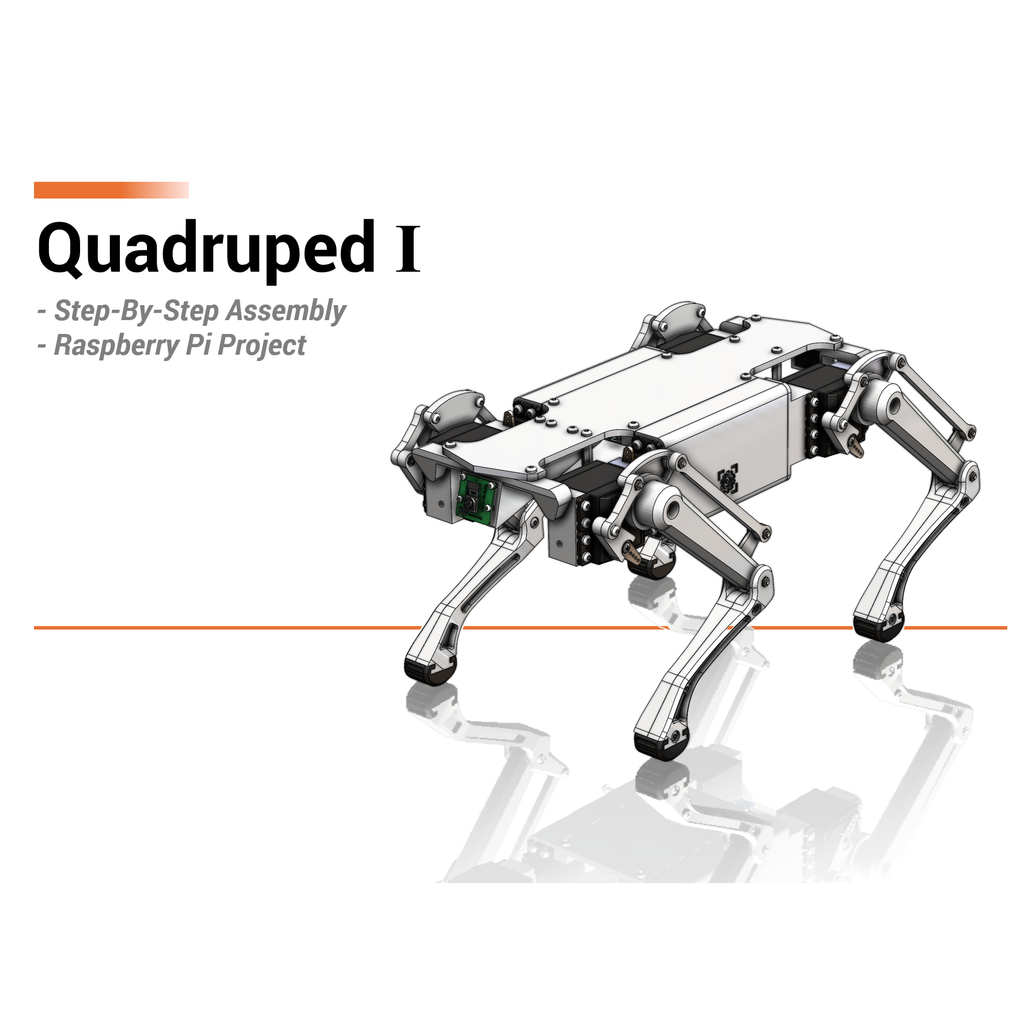
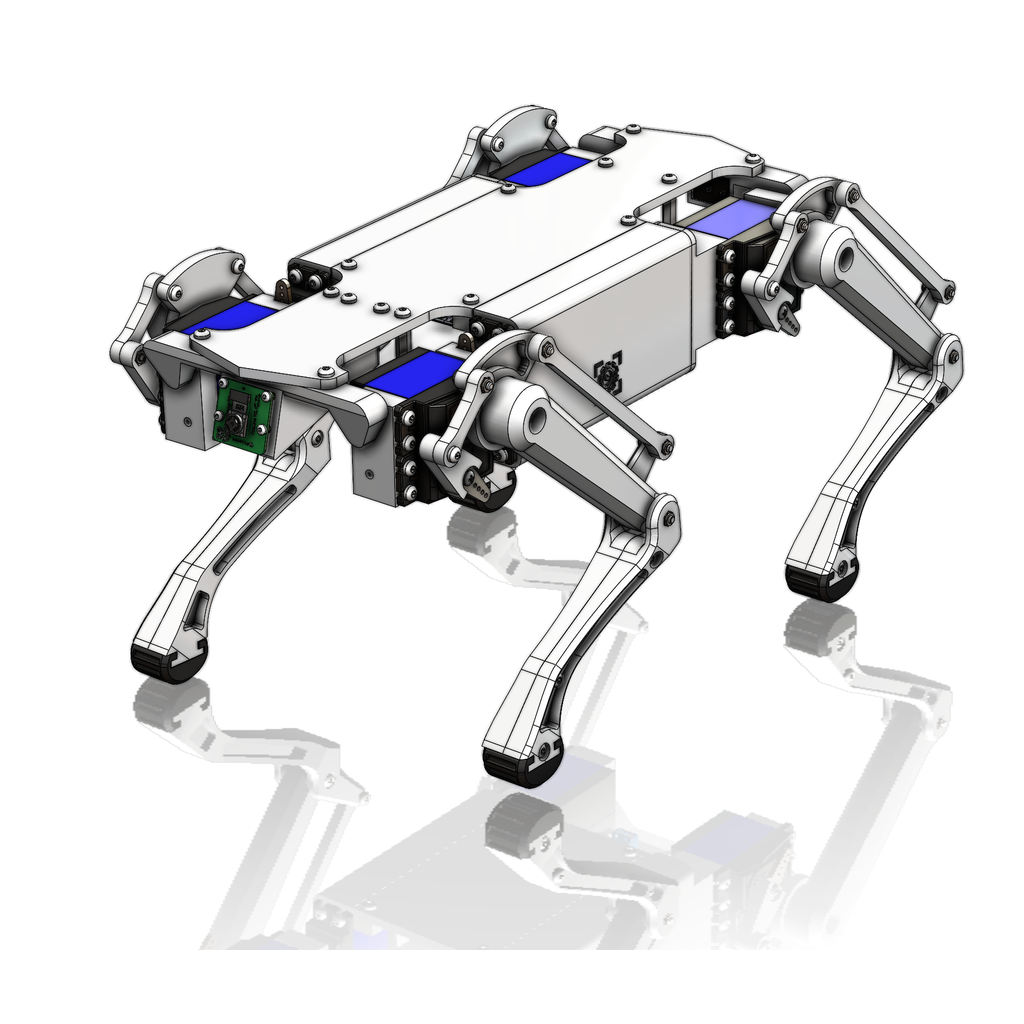



Четвероногий робот с возможностью отслеживания и следования на основе компьютерного зрения. Модель основана на существующем открытом проекте DIY четвероногого робота.
Инструкции для печати:
- Используйте органические поддержки, где это необходимо.
- 15% заполнение.
- Используйте PETG, ASA, ABS или другой жесткий материал.
- Ступни можно напечатать из любого материала, но для них предпочтительнее более мягкие материалы, такие как TPU.
Необходимые/Полезные инструменты:
- Провода резаки
- Съемники изоляции
- Набор прецизионных отверток
- Паяльник
Инструкции по установке:
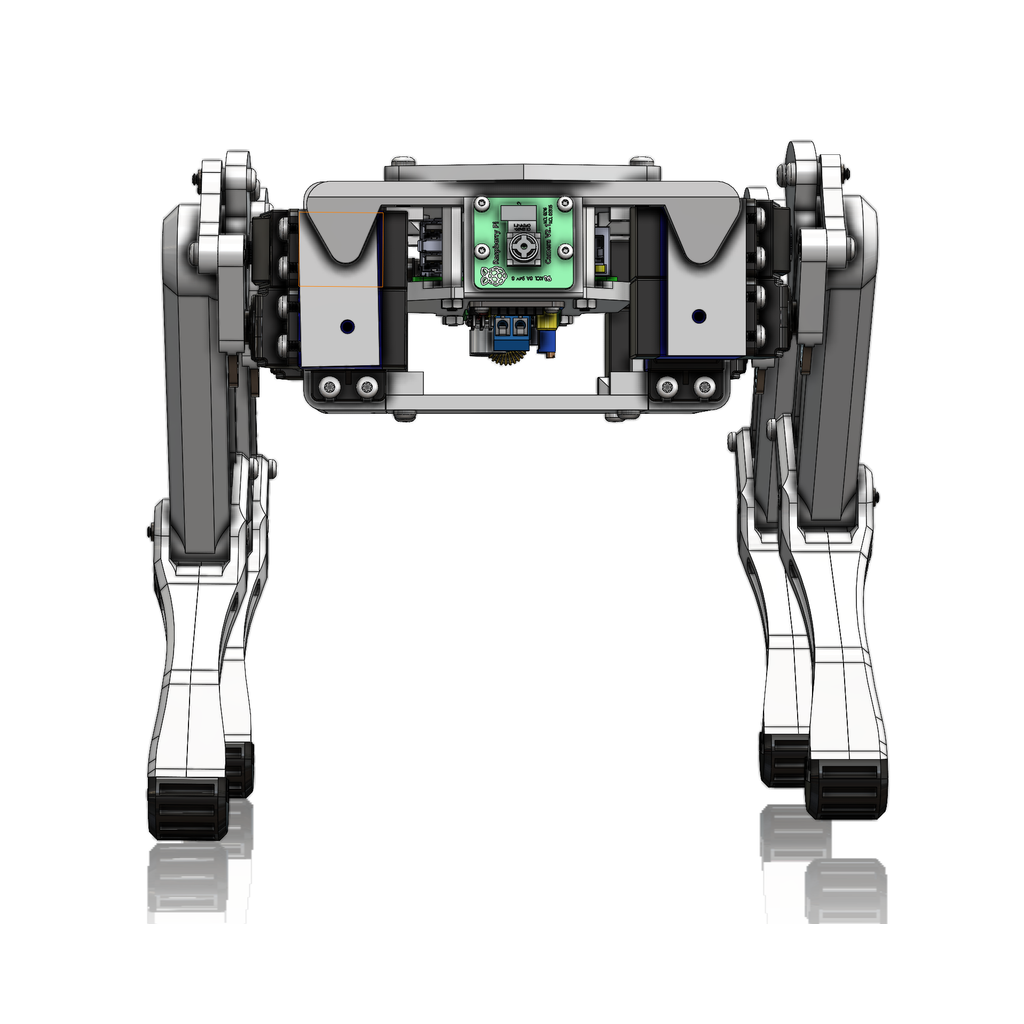
Чтобы использовать этот код, просто загрузите репозиторий на Raspberry Pi, установите необходимые пакеты, настройте камеру и библиотеку сервоприводов, и выполните команду python3 control-quadruped. Это запустит движение и выведет IP и порт Raspberry Pi.
Подключите моторы к Raspberry Pi и выполните команду калибровки, чтобы центрировать все моторы. Продолжайте сборку, установив моторы на бедрах и прикрепив конечности. Для электричества просто подключите все к PWM.
Контроллер по компьютеру: контроллер имеет несколько дополнительных шагов, которые можно увидеть в инструкции.
-
quadruped-robot-main.zipСкачать
-
0102_Top_Cover.STLСкачать
-
0103_RearServo_Bracket.STLСкачать
-
0104_FrontServo_Bracket.STLСкачать
-
0105_LeftHipServo_Bracket.STLСкачать
-
0106_RightHipServo_Bracket.STLСкачать
-
0107_Camera_Bracket.STLСкачать
-
0108_Belly.STLСкачать
-
0109_Tail.STLСкачать
-
0201_Femur.STLСкачать
-
0202_Foot.STLСкачать
-
0203_Link_100mm.STLСкачать
-
0204_Link_28mm.STLСкачать
-
0205_MotorExtension.STLСкачать
-
0206_InnerRight_Tibia.STLСкачать
-
0207_OuterRight_Tibia.STLСкачать
-
0208_Right_Shoulder.STLСкачать
-
0301_InnerLeft_Tibia.STLСкачать
-
0302_OuterLeft_Tibia.STLСкачать
-
0303_Left_Shoulder.STLСкачать
-
0401_BellyBracket.STLСкачать
-
0101_Side_Cover.STLСкачать
-
1000_Quadruped_v0.6_Assembly_Guide.pdfСкачать
-
1000_Quadruped_BOM_v0.6.pdfСкачать
Для добавления комментариев необходимо войти.
Информация
- Автор: admin
- Дата: 04.12.2025
- Категория: Хобби и Радиоуправление
- Просмотров: 125
- Загрузок: 509
- Лайков: 0
- Изображений: 46
- Файлов: 24
Скачать ZIP